XiaoMi-AI文件搜索系统
World File Search System随身携带
随身携带 VXP
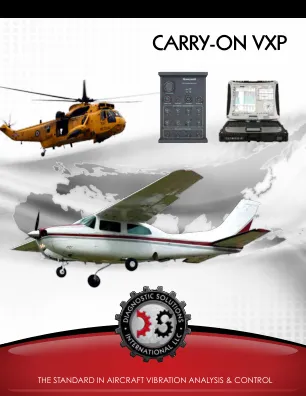
Honeywell VXP 系统由 VXP 采集单元 (AU)、VXP 显示单元 (DU)、软件以及相关随身携带套件和传感器组成。VXP 系统可与飞机各处的振动和转速计传感器连接,此外还可与用于主旋翼叶片跟踪的可选 FasTrak™ 光学跟踪器连接。VXP 软件分为两个主要系统。第一个是操作程序,它永久驻留在 VXP AU 的 EPROM 内存中;第二个是驻留在 VXP DU 上的支持软件,例如 VXP 显示程序、Vib Review™ 趋势软件和 VibraLog™ 高级预测性维护软件。所有数据都带有日期时间戳,并且可以与其他飞机数据系统(即 FDR/HFDM)相关联。

随身携带 VXP - VIBRATECH
功能 VXP 专注于收集、处理和解释飞机传动系统内各个部件(包括发动机、变速箱、轴、风扇、旋翼系统和其他动态部件)产生的数据。在所有情况下,都可以在发动机现场、测试单元内或任何其他平台位置查看振动频谱。收集并保留这些数据,以便任何熟练的技术人员进行更详细的分析。

您可以随身携带这款飞行 4K HDR 摄像机。
3.1 主要特性 ................................................................................................................................................10 3.2 F LIGHT 控制器 ..............................................................................................................................................10 3.2.1 组件 ................................................................................................................................................10 3.2.2 传感器性能 ........................................................................................................................................10 3.2.3 估算算法 ........................................................................................................................................11 3.2.4 控制回路 ........................................................................................................................................11 3.3 F LIGHT 模式 .............................................................................................................................................12 3.3.1 精确悬停 .............................................................................................................................................12 3.3.2 精确返航 (RTH) .............................................................................................................................12 3.3.3 智能 RTH .............................................................................................................................................12 3.3.4 自动起飞 .............................................................................................................................................12 3.3.5 手动起飞 ................................................................................................................................................12 3.3.6 低空飞行 ................................................................................................................................................13 3.3.7 自动着陆 ................................................................................................................................................13 3.4 飞行模式 ................................................................................................................................................13 3.4.1 手动 ................................................................................................................................................13 3.4.2 自动 ................................................................................................................................................13


4位二进制填充加法器,带有快速随身携带数据表(Rev. E)
• Bypass capacitor placement – Place near the positive supply terminal of the device – Provide an electrically short ground return path – Use wide traces to minimize impedance – Keep the device, capacitors, and traces on the same side of the board whenever possible • Signal trace geometry – 8mil to 12mil trace width – Lengths less than 12cm to minimize transmission line effects – Avoid 90° corners for signal traces – Use an unbroken ground plane在信号迹线下方 - 带有地面的信号迹线周围的洪水填充区域 - 对于超过12厘米的迹线•使用阻抗控制的迹线•源 - 端端使用输出附近的串联阻尼电阻器•避免分支;缓冲信号必须单独分支
临床神经生理学系...
随身携带什么:如果您是氧气的常规用户,请随身携带,因为我们的部门没有管道供应。如果患者是婴儿或孩子,如果父母/监护人可以带上饮料/玩具/DVD,这将有所帮助。请继续服用您的常规药物。您所接受的书面清单对生理学家有帮助。
您需要了解的有关 Ultomiris 和 Soliris 的信息
您的医疗保健提供者将向您发送一张关于严重脑膜炎球菌感染风险的患者安全卡。 • 如果您正在服用 ULTOMIRIS ,请在治疗期间以及最后一次服用 ULTOMIRIS 后 8 个月内随身携带此卡。 • 如果您正在服用 SOLIRIS ,请在治疗期间以及最后一次服用 SOLIRIS 后 3 个月内随身携带此卡。 • 在您服用最后一次 ULTOMIRIS 和 SOLIRIS 后,您患严重脑膜炎球菌感染的风险可能会持续数月。 • 向任何为您提供治疗的医疗保健提供者出示此卡。这将有助于他们快速诊断和治疗您。 • 即使您没有随身携带卡,也应立即接受治疗以治疗任何脑膜炎球菌感染的体征和症状。
专员法规136.7
(6) Licensed nurses, nurse practitioners, physician assistants, or physicians employed by school districts or boards of cooperative educational services are authorized to calculate prescribed insulin dosages, administer prescribed insulin, program the prescribed insulin pump, refill the reservoir in the insulin pump, change the infusion site, inject prescribed glucagon, teach an unlicensed person to administer对个人的热血糖素,并根据受教育法的第七章的执业范围进行其他授权服务,向医师或其他正式授权的医疗保健提供者诊断为糖尿病的学生,并在本节下允许在本节中自行胰岛素和携带葡萄糖和携带葡萄糖和随身携带和随身携带和携带和携带葡萄糖或携带和携带和携带和携带和携带和携带和随身携带和携带和携带和携带和携带和携带和携带和携带和携带和携带和携带和all态的服务。本节中的任何内容均不得授权无执照的人执行这些服务,除非教育法第921条。