XiaoMi-AI文件搜索系统
World File Search System雷达技术

阿拉斯加净空部队基地 (CSFS) 远程识别雷达 (LRDR)
LRDR 旨在为作战人员提供先进的地面传感器功能,支持从导弹预警、跟踪和识别到空间领域感知等一系列需求。LRDR 具有无与伦比的能力,可以同时搜索、跟踪和识别多个小物体,范围非常远,全天候 24/7/365。LRDR 将成熟的固态雷达技术与成熟的弹道导弹防御算法相结合,所有这些都基于能够满足未来增长的开放式架构平台。LRDR 采用独特的方法在密集的作战空间中准确识别威胁,使其有别于当前的地面传感器。双单基阵列,每个阵列高 60 英尺,宽 60 英尺,与氮化镓技术相结合,形成更强大、更强大的雷达。该技术旨在:

军用雷达:...时代的全视之眼
1.军用雷达:作战系统主要视频传感器 根据扫描控制方式不同,雷达站可分为机械扫描雷达、电子扫描雷达、频率扫描雷达、相控阵雷达(相控阵雷达)和合成孔径雷达(特别行政区)。雷达作为现代战争作战系统的主要视频传感器,负责对目标进行全天候精确侦察和实时监控;探测和跟踪可能对军事基础设施造成严重损害的武器,例如弹道导弹和巡航导弹;各种隐藏目标的检测和识别;确定失败的结果并识别目标、导弹制导和武器火力控制。2.世界军用雷达发展趋势:技术多元化、市场稳定、产业集中 雷达技术正处于发展中期阶段。整个中间阶段是基于相控阵雷达、合成孔径雷达和脉冲多普勒雷达三个主要系统的起源、发展、完善、集成和智能化。雷达的发展包括三个方向——载体和系统的多样化以及宽频率范围(其扩展)。关于载体(安装地点),随着雷达技术向小型化、集成化方向发展,雷达的使用不再局限于地面、机载和舰载载体,而是越来越多地应用于无人机和卫星;说到波段,随着新波段(如毫米波雷达)的发现,雷达的波长不断扩大。纵观整个雷达系统,传统的脉冲多普勒雷达(PD - Pulse-Doppler)机械扫描模式正逐渐淡出背景,取而代之的是相控电子扫描阵列雷达和合成孔径雷达(SAR)。将成为主要发展方向。雷达系统最终将统一为一个网络,其特征还包括:多功能集成、数字化和分布式。短期内,雷达发展的重点将是天线技术、成像技术和射程扩展,即相控阵雷达、SA雷达和毫米波雷达。

基于雷达的地球观察有效载荷
CSIR已将C波段分阶段的雷达技术开发到足够的成熟度,以用于监视雷达产品和机载SAR示威者。这些阵列天线提供了宽带功能,可以允许精细分辨率SAR成像 - 如在机载的C-OWL SAR技术演示器上所示。该团队还展示了实时处理功能和精细分辨率(子测量)成像功能 - 使技术更接近于准备太空传播雷达应用程序。通过科学与创新部资助的研究和开发,该技术的某些部分也经过了辐射测试,并且在生产中可以使用第一个具有空间能力的子阵列的设计和开发,可用于实现完整的SAR卫星有效载荷。
合成孔径雷达教程 - CORE
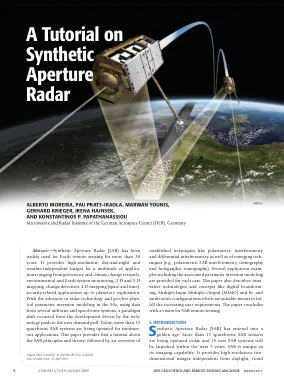
摘要 — 合成孔径雷达 (SAR) 已广泛用于地球遥感 30 多年。它为众多应用提供高分辨率、昼夜和不受天气影响的图像,包括地球科学和气候变化研究、环境和地球系统监测、二维和三维测绘、变化检测、四维测绘(空间和时间)、安全相关应用直至行星探索。随着 90 年代雷达技术和地理/生物物理参数反演建模的进步,使用来自多个机载和星载系统的数据,发生了从技术推动到用户需求拉动的范式转变。今天,有超过 15 个星载 SAR 系统正在运行,用于无数应用。本文首先介绍 SAR 原理和理论,然后概述

使用仿真数据的机器学习使用机器学习的到达角度估计
摘要 - 在汽车行业中,雷达技术正在越来越重要,因为它被用于对象检测,避免碰撞和巡航控制。鉴于雷达信号固有的大量数据,机器学习是制定对车辆情况意识至关重要的预测和决策的理想工具。该技术文档报告了一项初步研究,旨在通过使用机器学习技术的汽车雷达来估算目标,信号到达的方向。最初,进行了道路上的雷达方案的模拟,从而产生了64 GB的数据集,其中约为20万个样本。随后,该数据集被用于训练两种类型的深度学习算法:经典密集的神经网络和卷积神经网络。将结果与被称为音乐的经典信号方向进行比较。
mmwave Radar Radome设计指南
雷达技术在过去的几十年中,从导弹控制,地面监视,空中交通管制等军事应用中发展为众多汽车和工业应用,例如自适应巡航控制,公园辅助,自主停车场,运动和在场,探测,水平感应,水平感应,人数等。为了使雷达传感器在这些应用中完美执行,至关重要的是要确保辐射或外壳设计以最大程度地减少对雷达传感器天线的电和环境干扰。本申请报告提供了Radome设计的介绍,并突出了设计MMWave Radome的关键护理,同时考虑了雷达传感器的性能。它描述了一个辐射设计注意事项的概念,以及辐射测试和资格。示例以支持设计模拟和测量结果给出了不同的辐射体结构的示例。

噪声环境对量子照明雷达二元决策策略影响的评估
自 20 世纪末以来,雷达技术已得到广泛应用,尤其是在海事和航空领域 [1-3]。雷达技术中最重要的课题之一是在背景噪声中探测隐形目标。另一方面,当前量子技术的发展为远程探测提供了新的可能性,从而产生了量子雷达的概念。本文提出了一种基于光子对之间量子纠缠的量子雷达“玩具模型”。这种简单的模型并不追求逼真,而是具有关于量子雷达潜力的教育价值。当前用于传输信息的量子技术的发展引入了“量子雷达”的概念,尽管直到 2008 年 Lloyd 的文章发表之前,这个想法一直没有引起人们的兴趣 [4]。在这篇文章中,Seth Lloyd 表明,与光子对的量子纠缠可以显著提高光频范围内的远程探测灵敏度。这种利用纠缠进行远程检测的方式称为“量子照明”(QI)。自本文发表以来,人们对量子雷达领域的兴趣日益浓厚。该主题已经开展了新的理论和实验研究 [5-12]。围绕量子雷达的研究已经从关注单个光子转向小束光子 [4,11]。同样,研究也从光学频率范围 [4] 转向微波频率范围 [11-13],这更适合雷达应用,但也更具挑战性。在此背景下,目前正在开发新技术,以使微波领域的量子照明成为可能。例如,我们可以引用约瑟夫森结,它能够在低温下直接产生微波纠缠光子。还有光学光子和微波光子之间的耦合 [11]。然后,氮空位中心(称为 NV 中心)也允许产生微波纠缠光子。尽管这种量子雷达的可行性面临巨大困难,但该研究领域仍然非常活跃。量子雷达与传统雷达的用途相同,但其功能依赖于量子力学原理。

使用机器学习和
近年来,在人工智能和四轮驱动无人机开发领域已完成了许多工作。神经网络和人工智能培训由于其在人类生活中的几乎无限的应用而引起了研究人员的极大兴趣。一个主要目标是通过促进人与计算机之间的自然交流方法使人们每天处理的机器更容易访问。此外,在过去的几十年中,商业和消费级无人机以及光探测和范围(LIDAR)技术已经大大发展。今天,空中机器人在环境扫描,娱乐和军事行动等地区发现了许多用途。该小组希望将这两种令人印象深刻的技术结合在一起。使用机器学习和激光雷达技术来创建可以检测一组给定目标的四轮驱动器。无人机具有使用传感器飞行和检测几个不同对象的功能。我们的无人机具有四轮驱动器的标准设计,该项目的焦点是用于其视觉和感官分析的机器学习软件。第二个主要重点是

GESTRA的改进 - 用于监视低地球轨道中居民空间对象的分阶段阵列雷达网络
使用分阶段的阵列雷达用于空间情境意识提供了电子束转向和数字束形成的优势,从而可以在不同任务之间快速切换,例如形成搜索围栏和目标跟踪。通过德国实验空间监视和跟踪雷达盖斯特拉(Gestra),最近在弗劳恩霍夫(Fraunhofer)高频物理学和雷达技术研究所(Fhr)建造了一个系统。诸如Gestra之类的分阶段阵列雷达,由单独的接收器和发射器组成,可以启用准单位静态和偏爱操作模式。这种方法固有地提供了将Gestra扩展到多个,合作转移和接收单位网络的可能性。这样的系统会带来各种各样的机会,以提高空间监视的性能,同时鉴于信号处理和操作模式,也增加了方法论挑战。我们讨论了我们最近和正在进行的有关梯级雷达网络的调查,以进行太空监视,并根据Gestra报告即将实现此类系统的实现。