XiaoMi-AI文件搜索系统
World File Search System雷达技术
光学大气数据系统飞行测试 - NLR
问题领域 在 NESLIE(新型备用激光雷达仪器)项目中,开发、构建和测试了一种创新的光学空气数据系统。该系统在 DANIELA(基于激光的风速仪演示)项目中得到了进一步开发。该系统应用激光雷达技术测量飞机的空速矢量。该系统的故障模式与目前使用的皮托静态系统的故障模式不同。因此,飞行安全性有望提高。在 NLR 的 Cessna Citation II 研究飞机上进行的极地、温带和热带地区的飞行测试期间,对该新系统进行了评估。工作描述 空气速度系统已成功集成到研究飞机中,并于 2009 年春季(NESLIE)和 2011 年春季(DANIELA)进行了飞行测试活动。共进行了 46 次飞行,累计飞行时间超过 100 小时。收集并评估了大量测量数据。系统作为
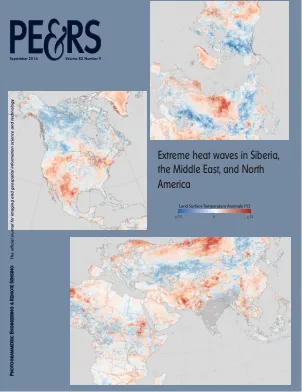
西伯利亚、中东和……的极端热浪 - ASPRS
Airgon LLC 彻底改变了无人机数据提取 — GeoCue Group, Inc. 的全资子公司 AirGon LLC 宣布推出 Topolyst™,这是一款先进的桌面应用程序,旨在轻松从无人机在建筑和采矿现场收集的点云和/或激光雷达数据中提取信息和衍生产品。Topolyst 的投资回报几乎是立竿见影的 — 以前需要几天时间才能完成的现场数据收集现在借助 Topolyst 强大的自动化工具在几小时内即可完成。PhotoScan 和 Pix4D 等应用程序提供了从密集图像覆盖中生成点云的复杂方法。无人机直接收集激光雷达技术才刚刚兴起。Topolyst 是一套综合工具,它利用这些软件和传感器的数据进行高精度现场测量和体积分析。Topolyst 包括大量可视化模式(平面、剖面、3D)和工具,例如:

fhr-lidar-and-radar-sensors-space-saving-headlight- ...
包括高频物理和雷达技术研究所 (FHR) 在内的五个弗劳恩霍夫研究所联合开展了智能大灯项目,旨在创建一种既节省空间又尽可能精巧的传感器安装方法,同时不会影响功能或性能。该项目旨在开发一种用于驾驶辅助系统的集成传感器的大灯,从而能够将一系列传感器元件与自适应照明系统相结合。希望这将提高传感器识别道路上物体的能力,尤其是识别行人等其他道路使用者。例如,激光雷达传感器可用于电子制动辅助或距离控制系统。“我们将雷达和激光雷达传感器集成到已经存在的大灯中,而且,它们是确保光学传感器和光源获得最佳传输并保持清洁的部件,”弗劳恩霍夫 FHR 研究员 Tim Freialdenhoven 说。 LiDAR(光检测和测距)传感器采用一种测量原理进行操作,该原理基于确定发射激光脉冲和接收反射光之间的时间,这种方法可以产生非常精确的距离测量。

“观澜”号太空海洋探测任务激光雷达概念图
摘要 在星载雷达观测海洋的各种挑战中,以下两个问题可能更为突出:动态分辨率不足和垂直穿透效果不佳。未来十年,雷达干涉测量和海洋激光雷达技术可能会取得两项备受期待的突破,预计它们将对亚中尺度分辨和深度分辨的海洋观测做出重大贡献。计划中的“观澜”科学任务包括双频(Ku 和 Ka)干涉测高仪(IA)和近天底指向海洋激光雷达(OL)。星载主动 OL 将确保更深的穿透深度和全时探测,从而对地下海洋的光学特性进行分层表征。OL 和双频(Ku 和 Ka)干涉测高系统的同时运行将使我们更好地了解大气和海气界面的贡献,从而大大减少两个传感器的误差预算。 OL有效载荷有望部分揭示真光层中垂直间隔10米的海洋食物链和生态系统,在动态和生物光学上向海洋混合层迈出重要一步。

2024 年 4 月 30 日
回复:拟议规则制定的预先通知:保护信息和通信技术和服务供应链:联网汽车 [案卷编号:240227-0060] RIN 0694-AJ56 尊敬的 Cannon 执行董事: Luminar Technologies, Inc.(“Luminar”)很高兴有机会就美国商务部工业和安全局(“BIS”或“机构”)2024 年 3 月 1 日发布的拟议规则制定预先通知发表意见,该通知涉及保护联网汽车供应链中的信息和通信技术和服务。 Luminar 是一家全球性的激光雷达技术公司,成立于美国,总部位于美国。激光雷达是实现汽车自动驾驶和高级安全的关键支持技术,我们相信,它将挽救全球无数生命,提高交通效率,并为许多服务不足的社区提供安全的出行。我们感谢 BIS 通过此 ANPRM 努力了解该传感器的全球业务以及该技术的具体操作特性。无论该规则制定的监管或政策结果如何,Luminar 都强调了在全球运输供应链和汽车市场中保持对 LiDAR 的不受限制的访问的重要性,以实现该技术带来的安全和社会效益。

机载激光雷达的应用及分析...
a 中国地质大学工程学院,武汉 430074,中国;b 中国测绘科学研究院,北京海淀区北太平路 16 号,100039,- jianfei1123@sina.com;第三委员会,第三工作组/3 关键词:海岸,应用,激光雷达,DEM,测量 摘要:激光雷达(LIDAR)是一种高精度、高密度获取三维坐标的新技术,集激光测距、计算机、GPS(全球定位系统)和 INS(惯性导航系统)于一体。潮间带地形测量是潮间带保护、开发和管理的基础工作,在我国测绘工程中占有十分重要的地位。本文简要介绍了激光雷达技术;然后在对TFACZ(潮滩与海岸带)特点与需求分析的基础上,指出LIDAR技术是解决TFACZ地理数据获取问题最有效的手段;对LIDAR技术在TFACZ地形测量中的应用进行了大量的探讨;最后利用Trimble GPS RTK系统对LIDAR数据的精度进行了检验。 1.引言

利用量子纠缠检测目标
量子照明的历史始于2008年,随后进行了两条研究。作品[6,7]从量子干涉仪的角度考虑了雷达问题。然而,这些作品被认为是高度理想化的场景,并忽略了热背景的影响。由于这篇综述着重于量子雷达的实用性,因此我们将不会进一步讨论这种方法,并专注于同年塞思·劳埃德(Seth Lloyd)开创的另一种方法[8],当他研究了如何使用量子光检测量子光以弱反复反射的靶标在热背景中包定的目标[8] 1。在他的工作中,劳埃德(Lloyd)考虑了两个方案:第一次使用n个独立的单个光子询问目标区域,而第二个协议使用n个光子彼此纠缠在一起。lloyd的结果表明,在基于纠缠的协议中,对目标存在做出错误决定的概率大大低于单光子的一个。这些结果受到量子光学界的激发的欢迎,因为它们似乎表明纠缠可以彻底改变当前的雷达技术。

粒子滤清器大满贯用于车辆定位
* liu,tianrui是电子邮件,电子邮件:tianrui.liu.ml@gmail.com摘要:同时本地化和映射(SLAM)在机器人技术中提出了强大的挑战,涉及地图的动态构造,同时确定了居住环境中机器人的精确位置。这项复杂的任务进一步加剧了固有的“鸡肉和蛋”的困境,其中准确的映射依赖于对机器人位置的可靠估计,反之亦然。SLAM的计算强度增加了一层复杂性,使其成为现场至关重要但苛刻的话题。在我们的研究中,我们通过采用粒子滤光片大量方法来应对SLAM的挑战。我们的方法利用了编码的数据和光纤陀螺仪(FOG)信息,以实现对车辆运动的精确估计,而激光雷达技术通过提供对周围障碍的详细见解来有助于环境感知。这些数据流的集成最终在建立粒子滤清器猛击框架中,代表本文中的键工作,以有效地导航和克服与机器人系统中同时定位和映射相关的复杂性。

利用机载激光雷达进行海岸线测绘概述
摘要:海岸线是重要的地理边界,监测海岸线变化在海岸综合管理中起着重要作用。随着遥感技术的发展,许多研究已经利用光学图像来测量和提取海岸线。然而,一些因素限制了光学成像在海岸线测绘中的应用。考虑到机载激光雷达数据可以提供更精确的地形信息,已经有一些研究使用机载激光雷达来绘制海岸线。然而,尚未进行将机载激光雷达与海岸线测量和提取方法相结合的文献综述。本文的目的是对使用机载激光雷达进行海岸线测绘进行叙述性回顾,包括激光扫描系统、数据可用性以及过去二十年来当前的提取技术。因此,我们进行了广泛的搜索,最终总结了 130 多篇关于机载激光雷达技术用于海岸线测量和海岸线提取的文章。我们发现利用机载 LiDAR 进行海岸线测绘仍面临诸多挑战,例如客观条件限制、数据可用性限制和自身特性限制。目前的海岸线提取方法有很大的改进潜力;特别是当与新兴的当前最先进的 LiDAR 点云处理技术(例如深度学习算法)相结合时,它们将具有巨大的潜力
此处填写职位名称 - 美国海军研究实验室
电磁学:开发新的计算电磁预测算法和软件实现,以提高预测精度和速度。使用先进的数值方法设计和分析新的天线概念。设计、建造、测试和应用新天线。 自适应信号处理:分析自适应处理的新概念,包括干扰消除、时空自适应处理和自适应滤波。设计和建立实验系统并进行现场测试。 雷达系统设计和分析:开发计算机模型来预测新雷达概念的性能,包括环境建模、开发精确的硬件模型、确定需求和评估技术性能。设计和建立实验系统并进行现场测试。 先进的雷达技术:分布式雷达、MIMO 技术、自动目标识别、电子防护、合成孔径雷达 (SAR)、逆合成孔径雷达 (ISAR) 和 AI/ML 的应用。 软件:为实验性射频传感系统和子系统开发软件。应用可能包括数字信号处理、模拟、数据采集、显示、可视化、跟踪和系统控制。 数字和射频设计:使用最新的 DSP 技术(包括 FPGA 和可编程处理器)开发先进的信号处理系统,并将其应用于实验和操作雷达。