XiaoMi-AI文件搜索系统
World File Search System非卡

用非...
使用时间依赖性的哈密顿人对量子系统的控制对于量子技术至关重要[1],即实施状态转移和闸门操作。一个重要的任务是确定如何在此类过程中实现最佳性能。在理想的封闭量子系统中,完美的操作在足够的时间给定时间[2]。速度限制是因为物理哈密顿人的界限,因此能量时间不确定性给出了最大的时间进化速率,从而提供最小的操作时间。除了这种理想的情况之外,还会出现其他考虑。当无法进行精确控制时,人们的渴望是对可靠操作的渴望;这可以通过使用强大的控制技术[3]或绝热过程[4,5]来实现。另一个是变形和耗散的影响。在标准的马尔可夫近似中,这种过程会随着时间的流逝而导致信息丢失。因此,尽管有明显的例外,但人们期望将快速操作最小化,以最大程度地减少信息丢失,在这种情况下,操作较慢允许访问decherence-tree-note-nodspace [6]。在本信中,我们显示在非马克维亚系统中并不总是需要快速操作,因为较慢的操作可以使信息回流得到利用以提高忠诚度。为了提供非马克维亚系统中速度和保真度之间权衡的具体演示,我们使用数值最佳控制来探索由由驱动的Qubit与波音环境相互作用的系统的可实现性能。最佳控制[7]涉及确定一组时间依赖性的控制场,以最大化目标函数(例如保真度)。在这里,我们表明可以使用我们先前引入的过程张量方法[8]的扩展在非马克维亚系统中进行效率进行效率,以有效地计算客观功能的梯度。这使我们能够反复优化数百个控制参数,以用于不同的过程

非 - ...
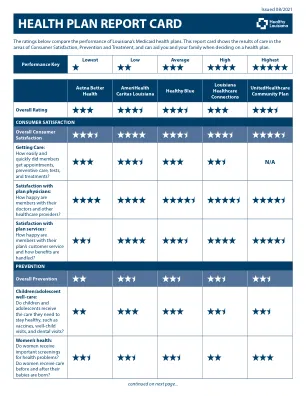
摘要 - 增强学习(RL)已经证明了在空中机器人控制中的短期培训中保持政策可塑性的能力。但是,在非平稳环境中长期学习时,这些策略已显示出可塑性的丧失。例如,观察到标准近端策略优化(PPO)策略在长期培训环境中崩溃并导致重大控制绩效降级。为了解决这个问题,这项工作提出了一项成本吸引力的框架,该工作使用回顾性成本机制(ROCOM)与非固定环境平衡RL培训中的奖励和损失。使用奖励和损失之间的成本梯度关系,我们的框架动态更新了学习率,以在受干扰的风环境中积极训练控制政策。我们的实验结果表明,我们的框架在不同的风条件下学习了悬停任务的政策,而在可变的风条件下,与使用PPO的L2正则化相比,在可变风条件下的政策崩溃,休眠单位的休眠单位少11.29%。项目网站:https://aerialroboticsgroup.github.io/ rl-plasticity-project/



MPS43B - 威卡
MPS43B 是独特的 MPS43 仪器的第二代产品,将一流的精度和性能集成到一个非常小的外壳中。改进的全平板配有集成电源开关,增强了环境保护。它使用户能够享受空气数据测试特性,并体验紧凑的尺寸和便携性,这是更传统设计的产品无法实现的。坚固轻巧的外壳满足了航空航天工业的苛刻要求,并提供了其他产品无法提供的无与伦比的成本和拥有优势。

B 计划 - 卡
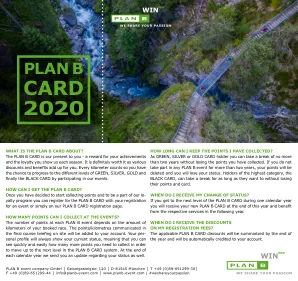
__________________________________________________________________________________________________________________________________ 活动注册折扣 5% 15% 20% 50%(仅适用于付费参与者) ___________________________________________ _____________________ ______________________________________________ ____________________ 商品折扣 5% 15% 20% 30% ___________________________________________ _____________________ ______________________________________________ ____________________ 合作伙伴活动折扣 xxxx ___________________________________________ _____________________ ______________________________________________ ____________________ 现场快速办理登机手续通道 - xxx ___________________________________________ _____________________ ______________________________________________ ____________________ 首选起始号码(取决于数字范围) - - - x ___________________________________________ _____________________ ______________________________________________ ____________________ 家人和朋友支持者套餐 5% 15% 20% 50% ___________________________________________ _____________________ ______________________________________________ ____________________ 第 10 次参与 TAR 的外卡 - - - x ___________________________________________ _____________________ ______________________________________________ ____________________ 任何延迟注册均免费* - - xx ___________________________________________ _____________________ ______________________________________________ ____________________ 在营地免费睡觉(如果提供营地) - - xx ___________________________________________ _____________________ ______________________________________________ ____________________ 永久保证起跑位置 - - xx 在 A 区分段赛(如有必要) ___________________________________________ _____________________ ______________________________________________ ____________________ 现场免费班车票(如有必要)可在活动开始前 4 周预订 - - - x ___________________________________________ _____________________ ______________________________________________ ____________________ 1 名支持者的意大利面派对优惠券 - - - x ___________________________________________ _____________________ ______________________________________________ ____________________ 取消时退款 - - - 100% ___________________________________________ _____________________ ______________________________________________ ____________________ 返回起点的免费班车票 - - - x ________________________________________________________________________________________________________________________________
