XiaoMi-AI文件搜索系统
World File Search System预设
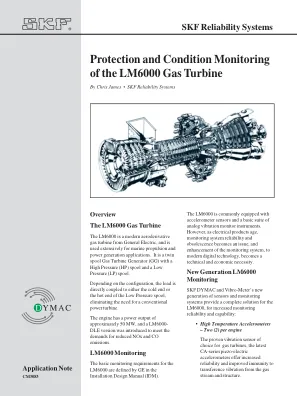
LM6000 燃气轮机的保护和状态监测
乘数/除法器和轮齿字段设置为产生 56.25 的“结果转速比”。这意味着实际原始速度信号除以 56.25 个齿,而不是 45 个齿。也就是说,6000 RPM 的高压轴速度被此 MPC-4 视为 (6000 x 45)/56.25 = 4800 RPM。因此,使用此速度通道作为参考的任何窄带处理(例如1X)实际上将监控真实速度的 0.8X。这样,VM600 可以配置为跟踪预设的窄带跟踪谐波 1/3X、1/2X、1X、2X、3X 和 4X 之外的任何谐波。
福特水表测试台及配件 - K 部分 - UTS
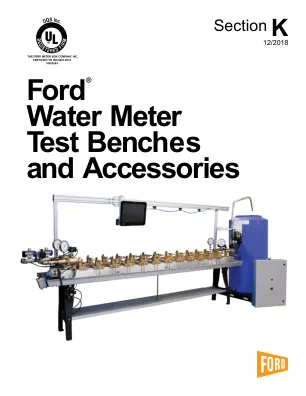
自动停止 福特自动停止旨在实现测试操作自动化,无需计算机系统即可提供各种流量测试,它利用单个操纵杆控制执行三种用户调整(预设)流量,在预定的罐体液位自动停止测试,并允许操纵杆控制停止和启动测试以及排空测试罐。有关订购信息,请参阅第 18 页。右侧照片展示了预计于 2019 年发布的新设计。
福特水表测试台及配件 - K 部分
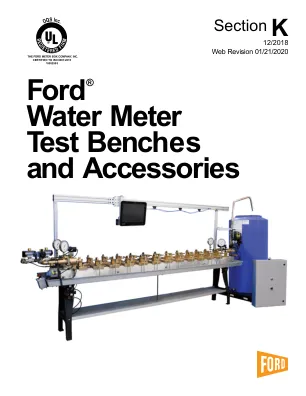
自动停止 福特自动停止旨在实现测试操作自动化,无需计算机系统即可提供各种流量测试,它利用单个操纵杆控制执行三种用户调整(预设)流量,在预定的油箱液位自动停止测试,并允许操纵杆控制停止和启动测试以及排空测试油箱。有关订购信息,请参阅第 18 页。右侧照片展示了预计于 2019 年发布的新设计。

指挥 - 斯威贡
适应情况 • 存在检测器持续检查房间内是否有人,并在预设的最小流量和占用流量之间调节气流。 • CO 2 传感器持续测量房间内的空气质量。当房间有人时,控制器会在预设的占用流量和最大允许流量之间可变地调节气流,以便为当前的占用人数提供足够高的气流。 • 压力传感器测量送风和排风侧的静态气压。压力读数用于平衡送风和排风以及控制风门叶片位置。 • 位于冷冻水供应管上的冷凝传感器可感应任何实际的冷凝沉淀。如果表面形成了冷凝,则连接到控制器的所有冷却阀执行器都会关闭,以停止冷凝水沉淀。当这种情况发生时,控制器会增加送风流量,以补偿容量损失,直到冷凝沉淀停止,水冷可以恢复。• 可以将窗户触点连接到系统,以感应窗户是打开还是关闭。如果窗户被证明是打开的,控制器会调整系统,关闭冷却、加热和通风,以避免不必要的能量损失。例如,如果有人在寒冷的冬夜把窗户打开,系统有一个内置的防霜冻保护功能,当室温降至 10°C 以下时,暖气就会启动。

高清平板 - TXN2670WHF
最大水平解像度为 800 线的速度扫描调制通过控制信号黑白部分之间的转换速度,清晰地定义边缘和轮廓。3:2 下拉:对转换为视频的电影作品的校正。3:2 下拉补偿了电影(每秒 24 帧)到视频(每秒 30 帧)帧速率转换中的固有缺陷,使图像更平滑,运动失真更少。INVAR 荫罩:一种合金材料,用于保持焦点和亮度的一致性,而不牺牲色彩纯度。色温控制 - 可通过屏幕显示选择正常、暖色和冷色。4 个视频预设可根据所观看的节目类型优化图像。预设:标准/动态/电影/自定义,用户可调整亮度、对比度、锐度、色彩和色调。垂直压缩可在“变形”宽屏源(如 DVD)期间保持垂直分辨率和质量。暗色调显像管可最大限度地减少反射并改善色彩和图像对比度。动态黑电平扩展和白峰值限制器进一步提高了图像对比度。自动显像管老化偏差可自动调节白平衡,即使使用多年后仍能保持一致、最佳的性能。数字视频降噪可用于提高图像质量。181 通道合成调谐倾斜校正允许根据地球磁场进行图像调整。数字底盘提高了整体可靠性。

EG4®18KPV监视器系统工作模式EG4®18KPV监视器系统工作模式
自我消费模式:系统将在预设的优先系统中运行。在此模式下,用户将体验来自太阳能数组的逆变器绘制功率来为负载供电。/如果/如果太阳能不足,则逆变器将从电池组中抽取负载。仅作为最后一个度假胜地,将逆变器切换到旁路模式到AC输入的功率负载。备份/交流电模式该系统将在预设的优先系统中运行。在此模式下,用户将体验来自太阳能数组的逆变器绘制功率来为负载供电。/如果/如果太阳能不足,则逆变器将切换到AC输入的电源负载。当没有其他选项时,逆变器只能用电池供电。力放电/出售给电网,用户可以配置逆变器,以通过设置的组合将PV和/或电池电量强加出售给电网。峰值剃须峰剃须用于避免通过使用设置的组合来限制从网格中抽出的功率来避免峰值需求电荷。PV充电优先级此模式允许用户特别是PV的电池充电优先级。如果电池充电后有多余的光伏电源,则逆变器将利用多余的功率发送到负载。要激活这些不同的工作模式,用户必须通过Web浏览器登录到EG4监视系统。按照本指南中列出的步骤导航到监视系统的“工作模式”部分。


Torkel 900系列
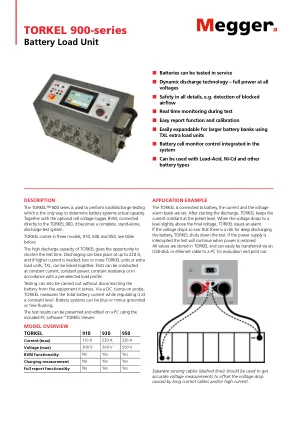
托包连接到电池,电流和电压警报级别设置。开始放电后,Torkel将电流保持在预设水平上。当电压下降到略高于最终电压的水平时,Torkel发出警报。如果电压下降得如此之低以至于有可能会导致电池进行深层排放,则Torkel会关闭测试。如果中断电源,则在恢复电源时测试将继续。所有值均存储在torkel中,可以通过USB或以太网电缆轻松地将其传输到PC中以进行评估和打印。

CheetahNAV 数据表 - 惯性实验室
这款多功能战术导航系统利用实时移动地图技术,持续为驾驶员和机组人员提供准确的态势感知信息。CheetahNAV 具有用户友好的图形导航功能,结合惯性和卫星位置信息,可在预设航点之间准确导航至目的地。CheetahNAV 使用先进的惯性导航系统 (INS),该系统由加速度计和陀螺仪等多种辅助设备组成,使用先进的卡尔曼滤波器算法提供平台的准确位置、速度、航向、俯仰和横滚。