XiaoMi-AI文件搜索系统
World File Search System飞机操纵

学习可解释的飞机操纵行为模型...
高速喷气式飞机的飞行员需要经过多年的高级训练才能获得出色的操控能力。如果能够将飞行员和其他领域专家的技能、知识和偏好提炼成一个能够捕捉真实操控行为的软件模型,那么这种方法将具有重大的实用价值。这种模型的可扩展性将使其可用于战略规划演习、培训以及其他软件系统的开发和测试。这将使人类驾驶专业知识这一稀缺资源获得更大的回报。这一愿景面临着实际挑战,即准确地获取所需知识以将其编入自动化系统。在许多需要直观决策和快速运动控制的情况下,专家一看到良好的操控性就知道,但并不总是能用形式或语言术语表达原因 [1]。∗ 显性知识获取策略也可能非常耗时,任何依赖专家演示的方法也是如此。这促使人们采用使用更稀疏数据源的基于学习的方法。鉴于透明度对于安全关键型航空应用的重要性 [ 2 , 3 ],任何此类方法都必须学习可解释(即人类可读和可理解)的专家知识模型,以促进信任和验证。本文提出了一个可能的解决方案。我们使用人工强化学习 (RL) 代理来生成 si 数据集
通过从人类反馈中进行强化学习来学习飞机操纵行为的可解释模型
高速喷气式飞机的飞行员需要经过多年的高级训练才能获得出色的操控能力。如果能够将飞行员和其他领域专家的技能、知识和偏好提炼成一个能够捕捉真实操控行为的软件模型,那么这种方法将具有重大的实用价值。这种模型的可扩展性将使其可用于战略规划演习、培训以及其他软件系统的开发和测试。这将使人类驾驶专业知识这一稀缺资源获得更大的回报。这一愿景面临着实际挑战,即准确地获取所需知识以将其编入自动化系统。在许多需要直觉决策和快速运动控制的情况下,专家们一看到良好的操控性就知道,但并不总是能用形式或语言术语表达原因 [1]。∗ 显性知识获取策略也可能非常耗时,任何依赖专家演示的方法也是如此。这促使人们采用一种使用稀疏数据源的基于学习的方法。鉴于透明度对于安全至关重要的航空应用的重要性 [2、3],任何此类方法都必须学习一个可解释(即人类可读和可理解)的专家知识模型,以促进信任和验证。本文提出了一种可能的解决方案。我们使用人工智能强化学习 (RL) 代理来生成模拟飞行轨迹数据集,然后咨询专家以获得对这些轨迹的成对偏好,表明哪一个是针对给定感兴趣任务的首选解决方案。众所周知,成对偏好引出具有稳健性和时效性,并为组合来自多个专家的数据提供了基础,而无需就共同的评分系统达成一致。然后,我们使用统计学习算法以基于规则的树结构形式构建收集到的偏好的可解释解释模型。反过来,该树被用作奖励函数来训练代理生成更高质量的轨迹,并迭代该过程直至收敛。最终结果是两个不同的输出,它们可以形成未来规划、培训和开发软件的宝贵组成部分:
改良 Cooper Harper 量表 (MCH) - SKYbrary
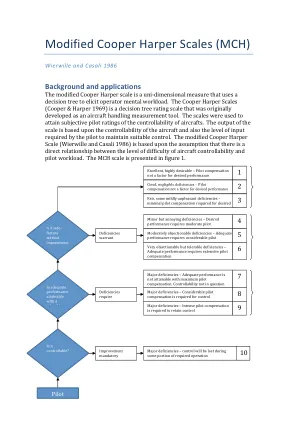
背景和应用 改进的 Cooper Harper 量表是一种使用决策树来引出操作员心理工作负荷的单维测量方法。Cooper Harper 量表(Cooper & Harper 1969)是一种决策树评定量表,最初是作为飞机操纵测量工具开发的。该量表用于获得飞行员对飞机可控性的主观评级。量表的输出基于飞机的可控性以及飞行员保持适当控制所需的输入水平。改进的 Cooper Harper 量表(Wierwille 和 Casali 1986)基于以下假设:飞机可控性的难度水平与飞行员工作负荷之间存在直接关系。MCH 量表如图 1 所示。
改良 Cooper Harper 量表 (MCH) - SKYbrary
背景和应用 改进的 Cooper Harper 量表是一种使用决策树来引出操作员心理工作量的单维测量方法。Cooper Harper 量表(Cooper & Harper 1969)是一种决策树评级量表,最初是作为飞机操纵测量工具开发的。该量表用于获得飞行员对飞机可控性的主观评级。量表的输出基于飞机的可控性以及飞行员保持适当控制所需的输入水平。改进的 Cooper Harper 量表(Wierwille and Casali 1986)基于以下假设:飞机可控性的难度与飞行员工作量之间存在直接关系。MCH 量表如图 1 所示。

对空气动力推力矢量控制的审查
推力矢量构成喷嘴优化和增加功能的下一步。喷嘴用于将射流引导到发动机轴以外的方向上,以产生飞机重心周围的横向力和矩,可用于飞机操纵。在二维螺距中只有喷嘴可以在垂直平面内偏转,因此喷嘴补充了水平控制表面。有几种类型的推力向量喷嘴。例如,有2-D和3-D推力向量的喷嘴。ITP喷嘴是3-D矢量喷嘴。也,达到气射流偏转的方法有不同的方法:最有效的方法是仅机械偏转截面,从而最大程度地减少对喉咙上游(Sonic)部分的影响。取决于此不同部分的控制水平,con-di喷嘴可以是两种类型:

飞机事故调查和调查委员会
2021 年 1 月 16 日 16:04 左右,一架 Piper Aircraft Inc.、Archer II、PA-28-181 型飞机(注册号为 RP-C2205),机上有一名飞行员和一名乘客,在菲律宾 Tuy Batangas 06 号跑道的私人飞机跑道上进行本地飞行时,螺旋桨和前起落架受到严重损坏。该飞机由 FAST Aviation Academy, Inc. 运营,属于通用航空。两名乘客均未受伤。事发时目视气象条件 (VMC) 占主导地位,没有提交本地飞行计划。起飞期间,飞行员注意到有人骑自行车穿过跑道。飞行员中止起飞,并使用最大刹车来停止飞机,但飞机转向跑道左侧。在将飞机操纵回跑道中心时,飞机螺旋桨与地面接触。前起落架与跑道入口的水泥末端相撞时也脱落。飞机

SAE 航空航天委员会
A-4 – 飞机仪表 A-4 大气数据工作组 AS8036 更新工作组 A-4 ED 电子显示器 A-4 EFIS 工作组 AS407 工作组 A-4 FLW 燃油流量计 A-4 HUD平视显示器 A-4 ULD 水下定位装置 A-5 航空起落架系统 A-5A 机轮、刹车和防滑控制装置 A-5B 齿轮、支柱和联轴器 A-5C 飞机轮胎 A-10 飞机氧气设备 A-20 飞机照明指导小组 A-20A 机组站照明 A-20B 外部照明 A-20C 内部照明 A-21 飞机噪音测量和噪音航空排放模型 A-22 防火和可燃性测试 AC-9 飞机环境系统 AC-9C 飞机结冰技术 AC-9M 客舱空气测量 S-7 驾驶舱和运输飞机操纵质量标准 S-9 客舱安全规定 S-9A 安全设备和救生系统 S-9B 客舱内饰和家具 飞机座椅 ACBG 机身控制轴承指导小组 ACBGPB 滑动轴承 ACBGREB 滚动元件

基于综合人为可靠性量化方法的飞行安全评估
人为失误是影响飞行安全的重要风险因素。尽管人为失误评估与减少技术(HEART)是一种有效的人为可靠性推导工具,但它尚未应用于飞行安全评估。传统的HEART严重依赖于单个专家的判断,导致评估影响比例(APOA)计算不准确,也无法提供针对飞行安全问题的补救措施。针对HEART的这些缺陷,本研究提出了一种综合的人为失误量化方法,利用改进的层次分析法确定APOA值。然后,将这些值融合到HEART方法中以得出人为失误概率。完成某项飞行任务来评估人为可靠性。结果表明,该方法是一种合理可行的工具,可用于量化飞机操纵过程中的人为失误概率并评估飞行安全性。此外,还识别了影响飞行安全的关键错误产生条件,并针对高错误率操作提供了改进措施。所提出的方法有助于减少飞机操作过程中人为错误的可能性并提高飞行安全水平。
![arXiv:1901.02602v1 [cs.LG] 2019 年 1 月 9 日](/simg/0\04ec387a38e523020e6fffe3b65c786036aa678b.webp)
arXiv:1901.02602v1 [cs.LG] 2019 年 1 月 9 日
摘要。目前无人机记录的数据集大多局限于动作识别和物体跟踪,而手势信号数据集大多记录在室内空间。目前,尚无用于无人机指挥信号的室外记录公共视频数据集。利用无人机的视觉传感器和操作简单性,可以有效地将手势信号用于无人机。为了填补这一空白并促进更广泛应用领域的研究,我们提出了一个在室外环境中记录的无人机手势信号数据集。我们从一般飞机操纵和直升机操纵信号中选择了13个适合基本无人机导航和指挥的手势。我们提供了119个由37151帧组成的高清视频片段。使用基于姿势的卷积神经网络 (P-CNN) 计算得出的整体基线手势识别性能为 91.9%。所有帧都标注了身体关节和手势类别,以便将数据集的适用性扩展到更广泛的研究领域,包括手势识别、动作识别、人体姿势识别和情境感知。

头盔中飞行参数指示匹配方法...
本文介绍了空军技术学院开展的分析工作的部分结果,这些分析工作涉及在飞机操纵时静态和动态状态下计算机匹配系统、数字显示和模拟设备的可能性。以垂直速度参数为例,提供了一种匹配直升机 Mi-17-1V 指示的方法,该直升机装有 SWPL-1 Cyclops 飞行数据头盔显示系统(由空军技术学院开发,与模拟航空电子设备合作)。通过第一排惯性元件调整垂直速度显示,在计算机图形 KG-1 中以编程方式实现。另一方面,调整头盔提示系统 NSC-1 Orion 中显示的信息的方法(由空军技术学院为 W-3PL Capercaillie 直升机制造)以及从集成航空电子系统(带数字航空电子设备)获得的信息,例如磁航向(从航向布局 KCS-305 获得)和地理航向(从惯性导航系统 EGI-3000 获得)。通过对多功能显示器 MW-1、半透明显示器 HUD 和头盔显示器 WDN-1 的指示进行修改(以选定偏角的形式,在计算机任务 KM-1 上以编程方式实现)和对磁偏差的修改(定期引入航向补偿器布局 KCS-305)来实现指示的调整。