XiaoMi-AI文件搜索系统
World File Search SystemAbdelli
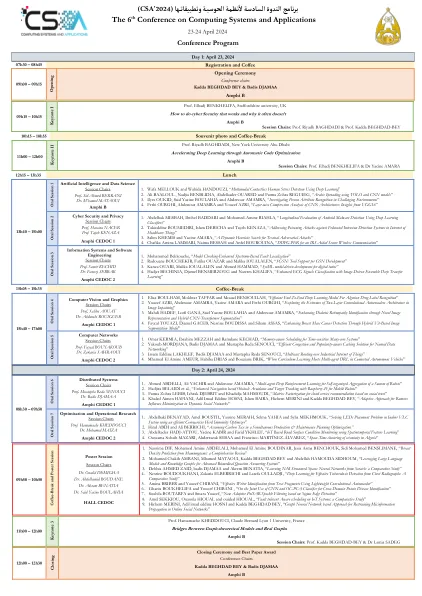
CSA'2024关于计算系统和应用的第六次研讨会)程序
1。艾哈迈德·阿卜杜利(Ahmed Abdelli),阿里·Yachir(Ali Yachir)和阿巴·阿马姆拉(Abdenour Amamra),“用于自组织的机器人集合的多代理深钢筋学习” 2。Hadjira Belaidi等人,“增强基于导航的障碍物的避免障碍物,并使用Raspberry-Pi进行移动机器人的目标跟踪” 3。Fatma Zohra Lebib,Ichrak Djebrit和Khadidja Mahmoudi,“基于社会信任的云服务建议的矩阵分解” 4。Khaled Aimen Hafiani,Adil Imad Eddine Hosni,Islam Baira,Hichem Merini和Kadda Beghdad Bey,“谣言的适应性方法
生活星球报告
莫德·阿卜杜利(WWF-switzerland),扎克·亚伯拉罕(WWF国际),多米尼克·安德拉迪·布朗(WWF-United State),迈克·巴雷特(WWF-United Kingdom),Nathan Bennett,Nathan Bennett(WWF-Global Science)(WWF-Global Science),Becky Chapkin-Chavlin-Kroblamer(Wwf-bobal Science)科学),Stefanie Deinet(伦敦动物学学会),罗宾·弗里曼(Robin Freeman)(伦敦动物学学会),莎拉·格拉瑟(Sarah Glaser),莎拉·格拉瑟(WWF-United States),雷切尔·戈尔登·克伦纳(WWF-United State),布伦特·洛肯(WWF-United State),Brent Loken,WWF-Global Science)(WWF-Global Science),Valentina Marconi Society(Valentina Marconi Society)(伦敦) Nijbroek(WWF荷兰),Jeff Opperman(WWF-Global Science),Pablo Pacheco(WWF-Global Science),Hannah Pupeston(伦敦动物学学会),Stephanie Roe,Stephanie Roe(WWF-Global Science),WWF-Global Science),Lucia Ruiz(Lucia Ruiz(WWF-Internation) (世界自然基金会国家),亚伦·维尔莫伦(WWF国际)和丹尼尔·维亚纳(WWF-United State)
2024 年地球生命力报告 - WWF
Maud Abdelli(WWF-瑞士)、Zach Abraham(WWF 国际)、Dominic Andradi-Brown(WWF-美国)、Mike Barrett(WWF-英国)、Nathan Bennett(WWF-全球科学)、Becky Chaplin-Kramer(WWF-全球科学)、Samantha Cheng(WWF-全球科学)、Stefanie Deinet(伦敦动物学会)、Robin Freeman(伦敦动物学会)、Sarah Glaser(WWF-美国)、Rachel Golden-Kroner(WWF-美国)、Brent Loken(WWF-全球科学)、Valentina Marconi(伦敦动物学会)、Louise McRae(伦敦动物学会)、Ravic Nijbroek(WWF-荷兰)、Jeff Opperman(WWF-全球科学)、Pablo Pacheco(WWF-全球科学)、Hannah Puleston(伦敦动物学会)、Stephanie Roe(WWF-全球科学)、Lucia Ruiz (WWF-美国)、Kirsten Schuijt(WWF 国际)、Abel Valdivia(WWF-美国)、Aaron Vermeulen(WWF 国际)和 Daniel Viana(WWF-美国)