XiaoMi-AI文件搜索系统
World File Search SystemAutoWare

自动驾驶汽车模拟:Carla和...
本文探讨了开源模拟器Carla与自动驾驶汽车(AV)系统的AutoWare,开源软件的集成,以创建一个全面的虚拟测试环境。这种集成可以对具有不可预测的因素和不断变化的环境的动态,现实世界情景的空气反应进行安全且具有成本效益的测试。我们使用Carla 0.9.15和Autoware 2204.01模拟了各种场景,从城市交通到恶劣天气,它们通过基于ROS的桥进行链接,并使用AV传感器作为LiDAR,相机和雷达等AV传感器来镜像现实世界中的配置。绩效指标被收集和分析以确定系统的优势和局限性。调查结果表明,Carla和Autoware集成为端到端的AV模拟提供了一个强大的平台,这对于开发安全,合规和高效的自动运输系统至关重要。

海报:在自动驾驶系统中发现传感器 - 融合 - 视力攻击
摘要 - 结合了LiDAR和相机等备用器的多数传感器融合(MSF),它引起了人们的关注,以此作为对Lidar Spoofiff的对策,威胁着自动驾驶系统的安全性。但是,当前无国界医生实施的有效性尚未在实际的自主驾驶系统中彻底列出。在这项研究中,我们提出了一个初始框架,旨在基于开源自动驾驶软件AutoWare Universe和Awsim Simulator探索MSF的潜在漏洞。通过使用此框架进行的实验,我们证明了自动保健宇宙中的MSF实现也可能导致整个系统的危险状态,即使摄像机丢失了镜头点云,摄像机可以正确检测对象。此漏洞之所以出现,是因为相机信息仅限于点云聚集中的补充作用。我们的发现表明,自动保健宇宙中的MSF实施缺乏针对LiDAR SPOOFIFG FIFG攻击的能力,由于其结构上的限制。该框架可在以下网址获得:https:// gi thub.com/keio-csg/multi-sensor-defense-analysis-platform。
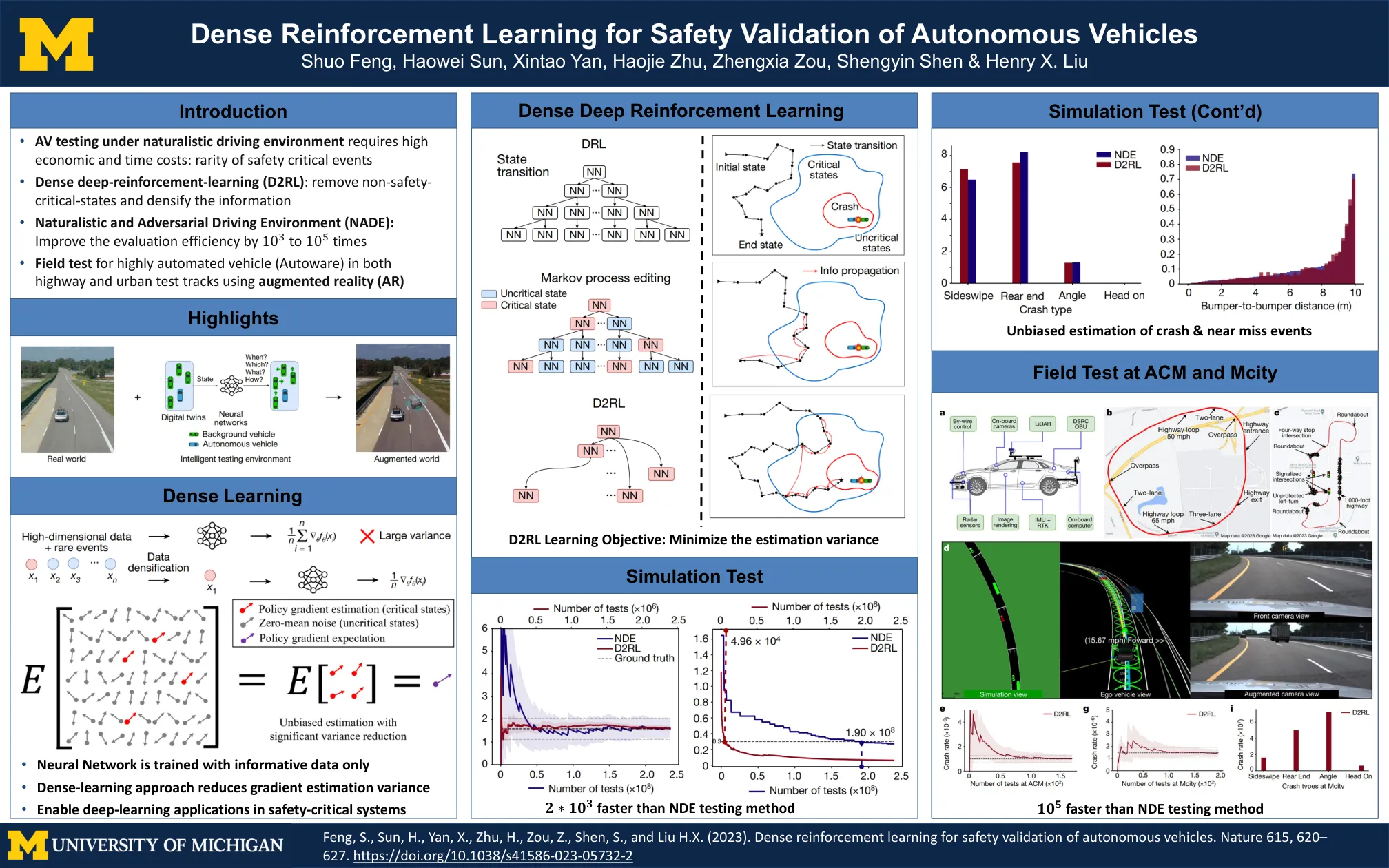
密集的强化学习用于安全验证自动驾驶汽车
•自然主义驾驶环境下的AV测试需要高的经济和时间成本:安全性关键事件的罕见•密集的深入强化学习学习(D2RL):删除非安全 - 关键态,并使信息密集•自然和对抗性驾驶环境(NADE)(NADE)的自动驾驶效率(NADE)进行了高度的测试•高度自动测试•高度自动驾驶型•在10到10次高度自动测试•驾驶型号•在10到5次范围内•在10到10次•提高了高度自动驾驶效果(•在10 3到10次)•高度自动驾驶范围•驾驶效率(•高度自动),并将其提高自动驾驶效率(inter),并在10 3至10次效果。 (ar)

commonRoad-carla接口:桥接运动计划和3D模拟之间的差距
摘要 - 在实际系统上验证Au au ausost everals的运动计划算法对于提高其在现实世界中的安全至关重要。开源计划,例如Autoware,为真实车辆提供了可部署的软件堆栈。但是,这种驾驶堆栈具有很高的进入障碍,因此集成新算法是乏味的。尤其是新的研究结果,主要仅在模拟中,例如在CommonRoad Benchmark Suite中进行评估。为了解决这个问题,我们提出了CR2AW,这是CommonRoad框架和自动保健之间的公开接口。CR2AW可以通过允许用户轻松将其CommonRoad计划模块整合到AutoWare中,从而大大简化了运动计划研究的SIM转移。我们在模拟和研究工具上进行的实验展示了CR2AW的实用性。


inhwan bae
卡内基·梅隆大学匹兹堡宾夕法尼亚州宾夕法尼亚州宾夕法尼亚州访问研究员,顾问:Jean Oh教授2022年9月2022年至2022年12月 - 基于行人步行模式的轨迹预测,Bot Intelligence Group,机器人Institute Daedong Institute daedong Industrial Co. LIDAR和GPS SONNET.AI DAEGU,S。韩国软件工程师,顾问:Joonwoo Son博士2019年5月 - 2019年9月2日 - 自主合作驾驶团队,专注于Slam和3D Urban Internizent Internime daegea Internime Interional,S. Sunghyun Cho教授2018年夏季 - 图像超级分辨率,视觉计算实验室,信息与通信工程融合研究所Daegu,S。韩国研究实习生,顾问:Dr.很快Kwon冬季2017年 - 自动驾驶汽车技术,汽车技术部研究部门,DGIST

对自动驾驶系统中的错误固定模式的全面研究
随着自主驾驶系统(ADS)变得越来越复杂,对日常生活不可或缺,因此相应地增长了这些系统中软件错误的性质和缓解性质的重要性。应对自动驾驶系统中软件维护的挑战(例如,处理实时系统决策并确保安全至关重要的可靠性)至关重要,这是至关重要的,这是由于实时决策要求的独特组合和广告中的高赌注。该领域中自动化工具的潜力是有希望的,但是我们对所面临的挑战以及手动调试和修复此类系统所面临的策略的理解仍然存在差距。在本文中,我们提出了一项经验研究,该研究调查了广告中的错误固定模式,以提高可靠性和安全性。我们已经分析了两个主要的自动驾驶项目的提交历史和错误报告,即阿波罗和自动驾驶,从1,331个错误修复中,研究了错误症状,根本原因和错误框架模式。我们的研究揭示了几种主要的错误框架模式,包括与路径计划,数据流和配置管理相关的模式。此外,我们发现错误框架模式的频率分布明显取决于其性质和类型,并且某些类别的错误是经常出现的,并且灭绝更具挑战性。根据我们的发现,我们提出了ADS错误的层次结构和15个句法错误框模式的两个分类法和27个语义错误框架模式,可为错误识别和分辨率提供指导。我们还贡献了1,331个ADS Bug-Fix实例的基准。

在自主驾驶系统中揭示了安全弱点:深入的经验研究
上下文:自主驾驶系统(AD)的出现标志着朝着智能运输的重大转变,对公共安全和交通效率产生了影响。尽管这些系统集成了各种技术并提供了许多好处,但它们的安全至关重要,因为脆弱性可能会对安全和信任产生严重的后果。目的:本研究旨在使用静态代码分析工具CodeQL系统地研究突出的开源ADS项目代码库中的潜在安全弱点。目标是确定共同的漏洞,它们在版本上的分布和持久性,以增强广告的安全性。方法:我们根据其高github恒星计数和4级自动驾驶功能选择了三个代表性的开源广告项目,即Autoware,Airsim和Apollo。使用CodeQl,我们分析了这些项目的多个版本以识别漏洞,重点是CWE类别,例如CWE-190(Integer Overflow或Wraparound)和CWE-20(输入验证不正确)。我们还通过软件版本跟踪了这些漏洞的生命周期。这种方法使我们能够系统地分析项目中的漏洞,这在以前的广告研究中尚未进行广泛探讨。结果:我们的分析表明,在选定的ADS项目中,特定的CWE类别,尤其是CWE-190(59.6%)和CWE-20(16.1%)。这些漏洞通常持续六个月以上,涵盖了多个版本的迭代。结论:广告中的这些安全问题仍有待解决。经验评估显示了这些漏洞的严重性与它们对ADS性能的切实影响之间的直接联系。我们的发现突出了将静态代码分析集成到ADS开发中以检测和减轻共同漏洞的必要性。同时,主动保护策略(例如定期更新第三方库)对于提高ADS安全至关重要。和监管机构在促进静态代码分析工具和设定行业安全标准方面可以发挥关键作用。

在自主驾驶系统中揭示了安全弱点:深入的经验研究
上下文:自主驾驶系统(AD)的出现标志着朝着智能运输的重大转变,对公共安全和交通效率产生了影响。尽管这些系统集成了各种技术并提供了许多好处,但它们的安全至关重要,因为脆弱性可能会对安全和信任产生严重的后果。目的:本研究旨在使用静态代码分析工具CodeQL系统地研究突出的开源ADS项目代码库中的潜在安全弱点。目标是确定共同的漏洞,它们在版本上的分布和持久性,以增强广告的安全性。方法:我们根据其高github恒星计数和4级自动驾驶功能选择了三个代表性的开源广告项目,即Autoware,Airsim和Apollo。使用CodeQl,我们分析了这些项目的多个版本以识别漏洞,重点是CWE类别,例如CWE-190(Integer Overflow或Wraparound)和CWE-20(输入验证不正确)。我们还通过软件版本跟踪了这些漏洞的生命周期。这种方法使我们能够系统地分析项目中的漏洞,这在以前的广告研究中尚未进行广泛探讨。结果:我们的分析表明,在选定的ADS项目中,特定的CWE类别,尤其是CWE-190(59.6%)和CWE-20(16.1%)。这些漏洞通常持续六个月以上,涵盖了多个版本的迭代。结论:广告中的这些安全问题仍有待解决。经验评估显示了这些漏洞的严重性与它们对ADS性能的切实影响之间的直接联系。我们的发现突出了将静态代码分析集成到ADS开发中以检测和减轻共同漏洞的必要性。同时,主动保护策略(例如定期更新第三方库)对于提高ADS安全至关重要。和监管机构在促进静态代码分析工具和设定行业安全标准方面可以发挥关键作用。