XiaoMi-AI文件搜索系统
World File Search SystemBB机

COVID-19疫苗提供商
(a)每个学区都需要通过双语或英语作为第二语言(ESL)课程模型提供双语教育,应为每个新兴的双语(EB)学生提供机会在其年级级别参加所需计划。每个学生的熟练程度应由语言能力评估委员会(LPAC)指定,该标题的第89.1220(g)条(与语言能力评估委员会(LPAC)有关)。学区应容纳指导,起搏和材料,以确保EB学生有充分的机会掌握所需课程的基本知识和技能,其中包括德克萨斯州的基本知识和技能(TEKS)和英语语言水平标准(ELPS)。参加双语课程模型的学生可能会证明他们对每个内容领域的家庭或合作伙伴语言或英语中的基本知识和技能的掌握。
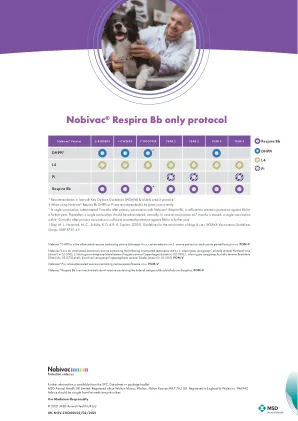
Nobivac®respira BB仅协议
†使用Nobivac®respira bb dhppi或pi时,请同时给予。^一次疫苗接种,在用Nobivac®respira BB进行初次疫苗接种后7个月进行,足以维持对BB的保护。此后,应每年进行一次疫苗接种。如果错过了7个月的重新疫苗接种,则在初次疫苗接种后的12个月内进行一次疫苗接种足以扩展对BB的保护。1.Day,M。J.,Horzinek,M。C.,Schultz,R。D.&R。A. Squires。(2015)。狗和猫疫苗接种指南。WSAVA疫苗接种指南组。JSAP 57:E1-45



Showtec®BB18 BMD18241AGN►饮食◄
INGREDIENTS Ground Corn, Dehulled Soybean Meal, Dried Whey, Soybean Hulls, Animal Fat, BHT (A Preservative), Feeding Oat Meal, Sodium Bentonite, Dicalcium Phosphate, Fish Meal, Calcium Carbonate, Lignin Sulfonate, Maltodextrin, Blood Meal, Salt, Calcium Propionate (A Preservative), Zinc Amino Acid Complex, Extracted Citric Acid Presscake, Copper Sulfate, Choline Chloride, Ferrous Sulfate, Zinc Sulfate, Manganese Sulfate, Calcium Iodate, Yeast Culture (Saccharomyces cerevisiae), Diatomaceous Earth, Zinc Oxide, L-Lysine, Methionine, Natural and Artificial Flavors, Biotin, d-alpha Tocopheryl Acetate (Source of Vitamin E), Calcium Pantothenate, Niacin Supplement, Vitamin A Supplement, Menadione Dimethylpyrimidinol Bisulfite, Pyridoxine Hydrochloride, Riboflavin Supplement, Folic Acid, Vitamin B12 Supplement, Vitamin D3 Supplement, Selenium Yeast, Dried Trichoderma reesei fermentation product, Dehydrated Pichia Pastoris Fermentation 提炼。

《探索脑机接口的结构与应用》
在"⼤脑与机器"这⼀跨学科领域,通信⼯程的最新进展凸显了神经架构对⼯程进展的影响。这促使⼈们开始探索脑启发计算技术,尤其是⽣物识别(BCI)技 术。这些系统促进了活体⼤脑与外部机器之间的双向通信,能够读取⼤脑信号并将其转换为任务指令。此外,闭环BCI 还能以适当的信号刺激⼤脑。该领域的研 究涉及多个学科,包括电⼦学、光⼦学、材料科学、⽣物兼容材料、信号处理和通信⼯程。低维材料(尤其是⽯墨烯等⼆维材料)的特性进⼀步增强了脑启发电 ⼦学的吸引⼒,这些特性是未来类脑计算设备的基础。在⽣物识别(BCI)领域,通信⼯程在促进⼈脑与计算系统在数字通信、物联⽹、新兴技术、空间和IoX 设 备融合等不同领域进⾏⽆缝信息交换⽅⾯发挥着⾄关重要的作⽤。光⼦学和光⼦集成电路(PIC)是这⼀多学科研究中不可或缺的⼀部分,可为⽣物识别(BCI) 提供⾼速、节能的通信和⼀系列优势,包括⾼速数据传输、低功耗、微型化、并⾏处理和光刺激。这些特性使光⼦学成为⼀项前景⼴阔的技术,可推动脑机接⼝ 的发展,并在神经科学和神经⼯程领域实现新的应⽤。

住宅计划审查和检查指导文件 BB ...
确定整个城市属于抗震设计类别 C,以下支撑要求从 IRC 的此部分简化而来,适用于正在建造的最常见类型的房屋。一些不寻常的住宅设计和所有联排别墅必须遵循 R602.10 任何部分和所有部分的确切措辞和表格,因为可能需要额外的支撑(调整系数)。IRC 不允许任何超过 12 英尺高的板线。此简化清单仅适用于连续护套房屋。IRC 中有关于“间歇”支撑的规定,但以下项目中未显示。如果您打算使用“间歇”支撑,您必须在您的计划中清楚地说明它如何符合 IRC 第 R602.10 节。请注意,一般而言,间歇支撑需要更多的支撑(见下面#61 中的%)。