XiaoMi-AI文件搜索系统
World File Search SystemCentroid

在积累超临界光度的磁性中子恒星中的定量解释
上下文。磁性中子星(NSS)通常在其X射线光谱中表现出回旋谐振散射特征(CRSF)。回旋线被认为是在积聚柱中的辐射冲击中产生的。高光度NSS在回旋通线(E CRSF)和X射线光度(L X)之间显示出平滑的抗相关性。目标。已经指出,如果辐射冲击是循环基因线形成的位点,则观察到的高发光NSS中观察到的E CRSF-L X平滑抗相关与理论上预测的抗相关性与理论上的预测。电击高度与亮度近似线性增加,而偶极磁场作为距离的立方功率下降,从而意味着当亮度通过数量级的级数时,相反,与观察相反,则相反。由于没有其他候选位点可以进行回旋线形成,因此我们在辐射冲击时重新审查了与辐射冲击时的亮度的预测变化率,仔细观察所涉及的物理学。方法。我们开发了一个纯粹的分析模型,该模型描述了观察到的回旋能质心对冲击阵线高度的总体依赖性,包括相对论的增强和重力红移的影响。相对论的增强效应是由于相对于冲击的参考框架上游吸积等离子体的轻度相对论运动所致。reults。我们表明,相对论的影响明显削弱了预测的E Crsf-l x抗相关。我们发现,环形线能的能量随(a)(a)由于偶极磁场引起的冲击高度而变化。我们使用我们的模型来拟合X射线源V0332 + 53的数据,该数据表现出弱负相关,并证明该模型可以很好地拟合数据,从而减轻了观察结果和理论之间的张力。结论。可以通过增强柱沿积分柱的变化,多普勒增强的效果以及层次振动的效果,以及层次的红色速度的效果来解释,可解释了超临界吸积性方案中的弱抗相关性和X射线光度。 由于这些影响,中子恒星表面上的实际磁场可能比观察到的CRSF的天真推断值大约2个因子。可以通过增强柱沿积分柱的变化,多普勒增强的效果以及层次振动的效果,以及层次的红色速度的效果来解释,可解释了超临界吸积性方案中的弱抗相关性和X射线光度。由于这些影响,中子恒星表面上的实际磁场可能比观察到的CRSF的天真推断值大约2个因子。
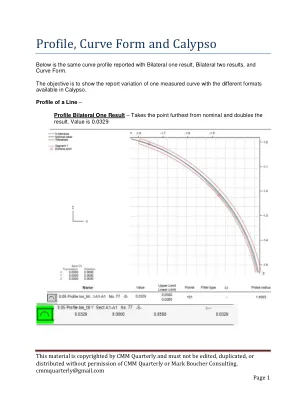
轮廓、曲线形式和卡里普索
轮廓和 SPC - 曲线上的轮廓不应指定 CPK 要求。没有质心或 X、Y、Z 位置作为目标。使用图形将曲线的位置定位到标称曲线轮廓。结论 - Calypso 中的轮廓符合 ANSI 和 ISO 标准。曲线轮廓的任何偏差都将显示在图形上。您必须根据图形进行调整。CP 和 CPK 不是 GD&T 轮廓的有效过程约束。曲线形式将为您提供曲线的形式,但不会准确报告曲线在 GD&T 轮廓方面的位置或可接受性。如上例所示,曲线形式为 0.050(+/- 0.025)公差的 0.0228。该形式使用接近轮廓公差的 ½,应在调整曲线以满足轮廓标注之前解决。
使用机器学习检测紧急创伤环境中的颅内血肿的早期预警系统
由算法确定标签。根据决策树,在从 Haralick 特征(30)和图像矩(即中心矩、原始矩、归一化中心矩和 Hu 矩)中评估的 50 个因素中,来自 Haralick 特征的熵和方差以及图像中的中心矩特征是决定标签的最有效因素。在图像处理中,图像矩是图像像素强度的加权平均值(矩),或此类矩的函数,通常选择具有某些有吸引力的特性或解释。通过图像矩找到的图像的简单属性包括面积(或总强度)、其质心以及有关其方向的信息。另一方面,熵测量图像直方图的强度,它显示图像中不同灰度级的概率。

在量子退火器上实现去模糊化算子
摘要 — 由于量子计算的内置并行性,未来量子计算机在处理一些复杂的模糊逻辑计算方面具有未被开发的潜力。最近,在一种称为量子退火器的量子计算机上,引入了一种基于解决二次无约束二进制优化 (QUBO) 问题的模糊集的新表示和一些基本模糊逻辑运算符 (并集、交集、alpha 切割和最大值) 的实现。本文通过提出一种基于二进制二次模型 (BQM) 的量子退火机上的质心去模糊化的实现来扩展这项工作,但这次使用的是 Ising 模型。通过在量子计算机上实现基本操作和去模糊化,本文为在量子退火器等增强型设备上实现整个模糊推理引擎铺平了道路。索引术语 — 量子计算、模糊逻辑、模糊集。

神经运动假肢治疗中风相关的麻痹
图3。神经影像学结果。在2019年1月19日发生急性中风时从MRI扫描中扩散序列;在右岩核核和邻近的白质(A)中,扩散限制是明显的。T2加权MRI从2021年1月22日起,显示了自中风(B)以来已经开发出来的脑乳突和相对心室的区域。功能性神经成像揭示了一个热点激活,由红圆圈表示,在中央沟的深度沿着前心回(C)的“手旋钮”区域。参与者的皮质表面的三维重建,该表面源自MRI,并以红色圆圈指示的想象的左手运动质心(d)。绿色阴影表示响应左手感觉刺激的区域。黑色正方形表示四个微电极阵列的位置。

B.E.电子和仪器工程B.E.电子和仪器工程
CMOS电路,寄生电容,MOS缩放技术,闩锁,匹配问题,布局中常见的质心几何形状。用于逻辑,算术和顺序块设计的数字电路设计样式;使用逻辑工作的设备尺寸;定时问题(时钟偏斜和抖动)和时钟分布技术;能源消耗的估计和最小化;功率延迟权衡,互连建模;内存体系结构,内存电路设计,感官放大器;集成电路测试的概述。基本和级联的NMOS/PMOS/CMOS增益阶段,差分放大器以及高级OPAMP设计,设备的匹配,错配分析,CMRR,PSRR和SLEW速率问题,偏移电压,高级电流镜;电流和电压参考设计,共同模式反馈电路,频率响应,稳定性和噪声问题;频率补偿技术。

神经运动假肢治疗中风相关的麻痹
图3。神经影像学结果。在2019年1月19日发生急性中风时从MRI扫描中扩散序列;在右岩核核和邻近的白质(A)中,扩散限制是明显的。T2加权MRI从2021年1月22日起,显示了自中风(B)以来已经开发出来的脑乳突和相对心室的区域。功能性神经成像揭示了一个热点激活,由红圆圈表示,在中央沟的深度沿着前心回(C)的“手旋钮”区域。参与者的皮质表面的三维重建,该表面源自MRI,并以红色圆圈指示的想象的左手运动质心(d)。绿色阴影表示响应左手感觉刺激的区域。黑色正方形表示四个微电极阵列的位置。

设计和开发用于室内的自主无人机飞艇...
摘要 — 本项目旨在开发一种小型飞艇,由人类远程控制。飞艇是无人驾驶飞艇 (UAV) 之一,可用于广告、VIP 安全检查、交通监控和管理等。本项目的主要目的是设计和开发一种用于室内监控和监测应用的自主无人机飞艇。图像将从安装在吊舱底部的无线摄像头捕获。确定物体的质心点需要使用三相边缘检测器、精明算子和阈值。该对象将以 2D 坐标显示在图形用户界面 (GUI) 上。在这个项目中,系统一次只能检测一个物体。关键词 — 精明算子、图形用户界面 (GUI)、物体检测、边缘检测器

采用广义粒子群优化的多旋翼无人机编队路径规划
关键词 路径规划,粒子群优化,广义 PSO,光学避障,无人机,无人机编队。摘要 本文研究了多旋翼无人机(UAV)在编队形状中协作检查周围表面的路径规划技术问题。我们首先将问题描述为在复杂空间中规划编队质心路径的联合目标成本。然后提出了一种路径规划算法,称为广义粒子群优化算法,用于在避开障碍物并确保飞行任务要求的同时构建最佳的可飞行路径。然后结合路径开发方案为每架无人机生成相关路径以保持其在编队配置中的位置。进行了仿真、比较和实验以验证所提出的方法。结果表明,使用 GEPSO 的路径规划算法是可行的。缩写