XiaoMi-AI文件搜索系统
World File Search SystemDeepLabcut

7。姿势估计的机器学习和计算机视觉
•熟悉计算机视觉-DeepLabcut [1]工具箱。•具有软件中的培训和测试CNN和DNN算法的专业知识,并了解在硬件上部署算法(在FPGA上)。•具有Python的培训,以及对基本信号处理概念的了解•具有Verilog和PCB设计的经验是首选•候选人必须具有自我驱动的态度,调试和解决问题的能力以及独立工作的能力。联系人:请与Mustafa Kanchwala(Mustafaa.kanchwala@mail.utoronto.ca)联系,然后复制到Roman Genov教授(roman@eecg.utoronto.ca)。请随附您的求职信,简历和成绩单(没办法可以)[1] https://www.mackenziemathislab.org/deeplabcut-动物姿势估计的软件包
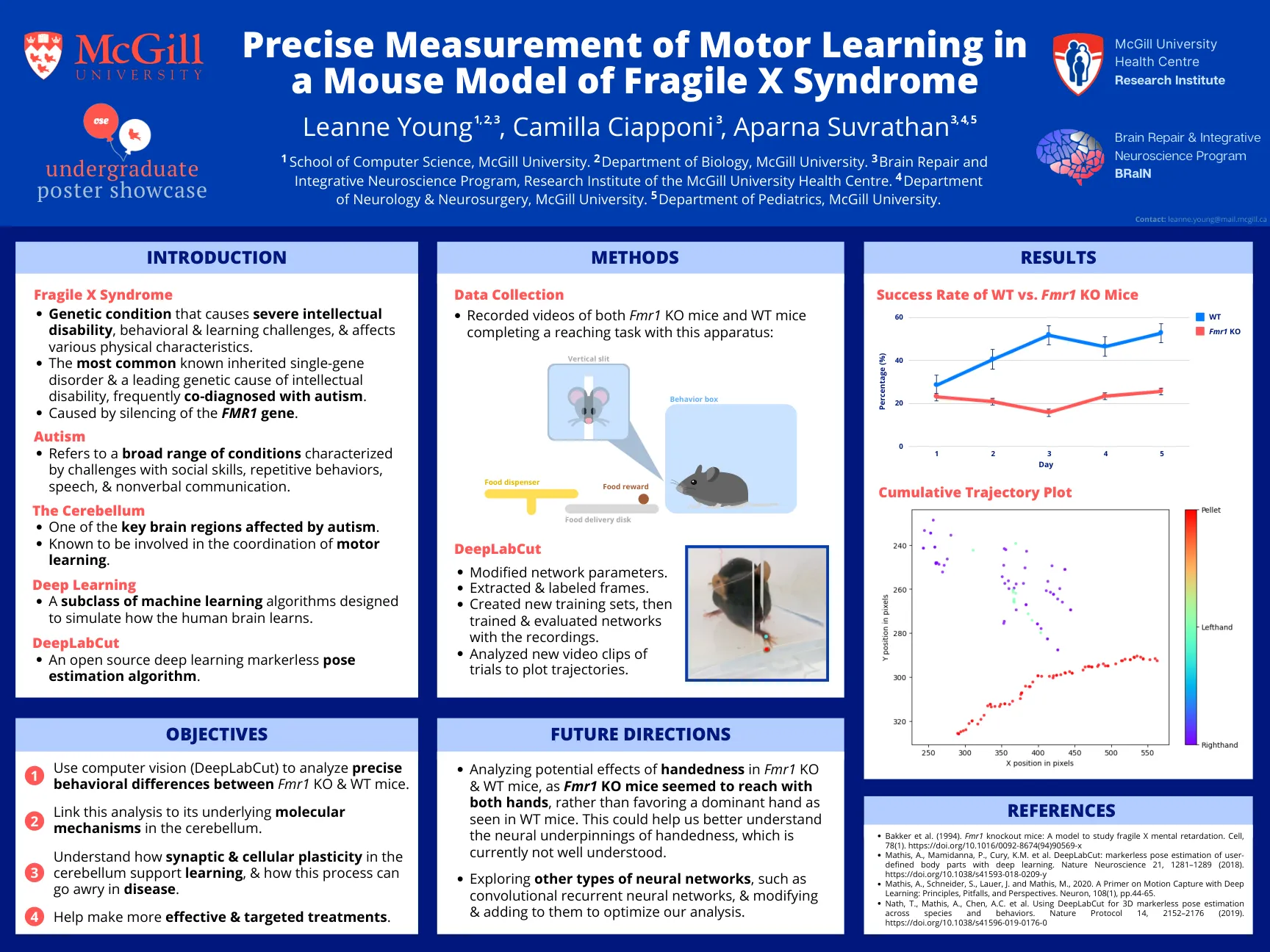
Leanne Young、Camilla Ciapponi、Aparna Suvrathan
Bakker 等人 (1994)。Fmr1 基因敲除小鼠:研究脆性 X 智力障碍的模型。Cell,78(1)。https://doi.org/10.1016/0092-8674(94)90569-x Mathis, A.、Mamidanna, P.、Cury, KM 等人。DeepLabCut:使用深度学习对用户定义身体部位进行无标记姿势估计。Nature Neuroscience 21, 1281–1289 (2018)。https://doi.org/10.1038/s41593-018-0209-y Mathis, A.、Schneider, S.、Lauer, J. 和 Mathis, M.,2020 年。使用深度学习进行动作捕捉入门:原理、陷阱和观点。 Neuron,108(1),第 44-65 页。Nath, T.、Mathis, A.、Chen, AC 等人。使用 DeepLabCut 进行跨物种和行为的 3D 无标记姿势估计。Nature Protocol 14,2152–2176 (2019)。https://doi.org/10.1038/s41596-019-0176-0
使用深度神经网络对头部固定小鼠的前爪进行实时选择性无标记跟踪
这里,我们描述了一个能够以高帧率(70.17 Hz)跟踪特定小鼠爪子运动的系统,并且具有高精度(平均值 = 0.95,SD,0.01)。特定身体部位的短延迟无标记跟踪开启了操纵运动反馈的可能性。我们提出了一种基于 DeepLabCut(一种强大的运动跟踪深度神经网络框架)的软件和硬件方案,可以实时估计小鼠的爪子和手指运动。使用这种方法,当一只爪子(而不是另一只爪子)的运动有选择地超过预设阈值时,我们通过触发 USB-GPIO(通用输入/输出)控制的 LED 来演示运动生成的反馈。爪子运动开始和 LED 闪烁之间的平均时间延迟为 44.41 毫秒(SD = 36.39 毫秒),这个延迟足以应用行为触发的反馈。我们将 DeepLabCut 改编为一个开源包,用于实时跟踪,我们称之为 DeepCut2RealTime。该系统能够快速评估动物行为,其通过强化限制饮水、头部固定的小鼠的特定动作得到了证实。该系统可以为未来的研究提供参考

连续的听觉反馈促进了小鼠的精细运动技能学习
运动技能学习使生物可以与环境有效相互作用,并依靠将感觉反馈与电机输出相结合的神经机制。虽然感觉反馈(例如与运动动作相关的听觉提示)增强了人类运动性能,但其作用机理的理解很少。开发可靠的增强运动技能学习动物模型对于开始剖析这种增强的生物系统至关重要。我们假设在运动任务期间连续的听觉反馈将促进小鼠的复杂运动技能。我们使用DeepLabcut开发了一个闭环系统,以实时无标记跟踪鼠标前爪动作,并具有高处理速度和低延迟。通过将前言的动作编码到不同频率的听觉音调中,小鼠在到达任务期间接收了连续的听觉反馈,需要将左前爪垂直位移到目标。成年小鼠在4 d培训中接受了听觉反馈或没有反馈的培训。与对照组相比,接收听觉反馈的小鼠表现出明显增强的运动技能学习。对轨迹的聚类分析表明,在运动训练的第2天之前,听觉反馈小鼠建立了一致的到达轨迹。这些发现表明,实时,运动编码的听觉反馈有效地促进了小鼠运动技能。这种闭环系统利用高级机器学习和实时跟踪,为探索运动控制机制和通过增强的感觉反馈开发运动障碍的治疗策略提供了新的途径。

Wika:提取的基于视觉的手语识别
多年来,使用手势识别手势翻译来解决听力多数与聋人之间的沟通差距取得了重大突破。虽然基于接触的方法使用可穿戴设备,但由于其提供的便利性,因此优选基于视觉的解决方案,并且由于它避免了对复杂齿轮的需求。本研究介绍了Wika的开发,Wika是一种开源软件,旨在跟踪手的关节并将其解释为相应的手语对应物。DeepLabcut是一种无标记的姿势估计软件,通过训练顺序卷积神经网络来开发手工接头跟踪模型,利用提取的手术字母(A-Z)和数字(A-Z)和数字(1-9)基于关节的定位。开发的手接跟踪模型显示出4.92%的训练误差和5.74%的测试误差,p切断为60%。另一方面,开发的手语识别达到了96.44%的预测准确性,仅为0.0356%的流行阶层。该模型可以进一步集成到手机中,以进行签名和非签名人群之间的无缝对话。关键字:菲律宾手语,手动跟踪,骨骼数据,姿势估计,卷积神经网络菲律宾语言语言(FSL),菲律宾的聋人使用,将其起源追溯到美国手语(ASL)[1]。在菲律宾,聋人,静音或听力障碍的人数总数约占人口的1.23%。FSL通过弥合聋人和菲律宾和世界其他地方的听力多数来证明其效用[2]。大多数听证会菲律宾人不了解FSL,并且掌握它通常需要正式的教学[3]在聋人人群和听力多数之间产生语言障碍和明显的沟通差距[4]。这一差距妨碍了有意义的互动,限制了教育机会,并为影响聋人社区的福祉和进步的排斥循环提供了。听力菲律宾人不了解FSL的普遍性不仅在表达方面形成了差距,而且导致了非听证人群的文化差异和社会隔离。促进聋人社区的社会包容性和平等机会,为研究人员提供了急需的动力,以探索

ORS 2025年会第334号会议论文
nesa.milan@ucsf.edu简介:肩袖撕裂会导致肩部疼痛和功能障碍,从而显着影响受影响患者的生活质量。肌肉萎缩和脂肪变性对肩袖(RC)修复后的临床结果产生负面影响。血流限制(BFR)是一种治疗方法,涉及血液流动的暂时限制,用于刺激下肢创伤和ACL重建后刺激肌肉再生和疼痛缓解[1]。但是,BFR的基本机制仍然未知,并且尚未应用于RC损伤。纤维生成祖细胞(FAP)是常驻的骨骼肌干细胞,已证明具有向肌原细胞捐赠线粒体的能力,以减少肌肉退化和RC泪液后的肩部功能改善[2]。这项研究的目的是研究BFR促进肌肉再生,改善肩部功能并缓解RC撕裂后的疼痛的能力和机制。我们假设BFR诱导了从FAP到肌细胞的水平线粒体转移,从而增强了肌肉再生,改善运动学功能并减轻RC损伤后的疼痛。方法:由于其解剖位置,直接将BFR应用于RC肌肉在技术上具有挑战性。取而代之的是,我们将BFR应用于肩膀附近的同侧臂,提出了一种更可行和转化的方法。这是通过将正畸橡皮筋涂在RC损伤的臂上,持续10分钟,然后切除10分钟,进行3个周期。小鼠。进行了功率分析,以确定所需的最小样本量。我们首先对健康的男性Prrx1-Cre/mitotag Fap-Monochondria Reporter小鼠(n = 4/组)测试了BFR。supraspinatus(SS)肌肉在手臂的同侧带有BFR,以进行组织学分析。在PRRX1-CRE/MITOTAG小鼠(n = 8/组)上,对BFR对受伤的RC肌肉的影响,单侧SS和肌腱横向和神经(TT+DN)进行了诱导RC撕裂。小鼠随机分配每三天或无作为对照治疗接受同侧ARM BFR。记录了手术前后小鼠的步态,并使用基于AI的步态分析系统(称为BlackBoxò)进行分析。疼痛。小鼠,并分析了SS肌肉的Mitotag信号传导和肌纤维大小。使用ImageJ分析所有图像。在基线时使用Blackbox和DeepLabcut评估运动学功能,并在OP后6周评估了前步长的长度和体重比率。 所有程序均由我们的IACUC批准。 结果:同侧ARM BFR在诱导SS肌肉中从FAP到肌细胞的线粒体转移具有显着影响(图1A-G)。 这种效果持续了BFR后长达3天,大约10.7%的肌纤维仍含有FAP转移的线粒体(图1E,G)。 与非BFR对照相比,在TT+DN损伤后2和6周,BFR在SS中的FAP线粒体转移显着增加(图2A-E,G)。运动学功能,并在OP后6周评估了前步长的长度和体重比率。所有程序均由我们的IACUC批准。结果:同侧ARM BFR在诱导SS肌肉中从FAP到肌细胞的线粒体转移具有显着影响(图1A-G)。这种效果持续了BFR后长达3天,大约10.7%的肌纤维仍含有FAP转移的线粒体(图1E,G)。与非BFR对照相比,在TT+DN损伤后2和6周,BFR在SS中的FAP线粒体转移显着增加(图2A-E,G)。此外,BFR处理后的平均肌纤维大小显着增加(横截面肌纤维面积,1d:2250±909.3μm2vs基线:1250±635μm2;图1A-F,H),在3天返回到基线。与对照相比,在TT+DN后2周,BFR治疗的肌肉的肌纤维大小明显更大(2315±442.5μm2vs 897.7±308.2μm2,图2A-D,F),表明其抗嗜性作用。在TT+DN损伤后6周,BFR和对照之间的肌纤维大小没有差异(图2A-D,H)。在运动参数方面,与非BFR对照组(p <0.05)相比,BFR显着改善了小鼠(平均= 2.16厘米)的小鼠(平均= 2.16厘米)的右手前步长(平均= 2.16厘米)(P <0.05)(图3A)。与非BFR对照组相比,BFR治疗组(平均值= 0.99)(平均= 0.55)(p <.01),BFR治疗组的前爪体重比(同侧/对侧)显着提高(平均值= 0.99)。该数据表明,TT+DN后,BFR显着缓解了小鼠的肩部疼痛(图3B)。