XiaoMi-AI文件搜索系统
World File Search SystemEuler

用衣服增强自动驾驶汽车导航...
摘要:这项研究使用与自适应lookahead机制集成的基于衣服的方法为自动驾驶汽车引入了先进的横向控制策略。主要的重点是通过应用Euler螺旋在平稳的曲率过渡中提高侧向稳定性和路径跟踪准确性,从而减少了乘客不适和车辆滚动风险。我们工作的创新方面是基于实时车辆动力学和道路几何形状的LookAhead距离的自适应调整,该距离可确保在不同条件下的最佳路径。准反馈控制算法在每个时间步骤构造了最佳的衣服,从而生成适当的转向输入。铅过滤器补偿了车辆的横向动力学滞后,从而提高了控制响应能力和稳定性。通过使用Trucksim®和Simulink®的全面共同模拟,拟议控制器的效果得到了验证,这表明了各种驾驶场景中横向控制性能的显着改善。未来的方向包括扩展控制器的高速应用程序,并进一步优化以最大程度地减少轨道错误,尤其是对于清晰的车辆。

对差异平面系统的最佳控制非常容易
随着我们转向日益复杂的网络物理系统(CPS),需要采用新的方法来实时计划有效的状态轨迹。在本文中,我们提出了一种方法,可以显着降低解决具有非线性动力学的CP的最佳控制问题的复杂性。我们利用差异平坦度的属性来简化优化过程中出现的Euler – lagrange方程,而这种简化消除了通常会遇到最佳控制的数值不稳定性。我们还提出了一个显式微分方程,该方程描述了最佳状态轨迹的演变,并扩展了结果以考虑不受约束和受约束的情况。此外,我们通过为带有两个Revolute关节的平面操纵器生成最佳轨迹来证明方法的性能。我们在模拟中表明,我们的方法能够在4中生成受约束的最佳轨迹。5 ms尊重工作空间约束并在肘关节中的“左”弯曲和“右”弯曲之间切换。©2023 Elsevier Ltd.保留所有权利。

代表不同坐标系中的量子旋转,用于建模刚体方向
1。简介compution countientation在包括机器人技术和航空设备在内的许多领域中,刚体的方向是一项重要任务。特定于机器人技术,定向在许多工业,医疗和手术应用中起着基本作用。各种方法通常用于建模和表示刚体的方向,例如球形坐标和欧拉角,或偏航,俯仰和滚动(YPR)角度。这些方法使用3 3个矩阵来保存三个单元向量的投影坐标,从而使它们成为内存和资源密集型。相比之下,还开发了紧凑的方法,例如四季度和双重四季度。此代表仅使用四个组件:一个真实和三个虚构部分。上述所有方法已成功用于多个应用程序;
学术手册B.Tech计划
模块1:矩阵和应用程序 - 矩阵:矩阵操作 - 附加,标量乘法,乘法,转置,伴随及其属性;线性方程和高斯消除,决定因素及其特性的系统;克莱默的统治;向量空间:子空间,线性依赖/独立性,基础,维度,r^n的标准基础,线性变换,线性变换的矩阵,基础和相似性的变化,rank-nullity定理;内部产物空间,革兰氏阴性过程和正统基础,特征值和特征向量,特征多项式,对角线化。模块2:单个变量的差分计算函数:函数和先验函数;限制,连续性和不同性;平均价值定理,泰勒和麦克拉林的定理;参数方程和极坐标。几个变量的函数:部分分化;总分,欧拉的定理和概括;
机械工程教学大纲(MTQP07)
单元1:工程数学线性代数:矩阵代数,线性方程系统,特征值,特征向量。Calculus: Mean value theorems, Theorems of integral calculus, Evaluation of definite and improper integrals, Partial Derivatives, Maxima and minima, Multiple integrals, Fourier series, Vector identities, Directional derivatives, Line integral, Surface integral, Volume integral, Stokes's theorem, Gauss's theorem, Divergence theorem, Green's theorem.微分方程:一阶方程(线性和非线性),具有恒定系数的高阶线性微分方程,参数变化的方法,Cauchy方程,Euler方程,初始值和边界值问题,部分微分方程,部分微分方程,变量分离方法。复杂变量:分析函数,Cauchy的积分定理,Cauchy的积分公式,Taylor系列,Laurent系列,残基定理,解决方案积分。概率和统计:对定理,有条件的概率,平均值,中位数,模式,标准偏差,随机变量,离散和连续分布,Poisson分布,正态分布,二项式分布,相关分析,回归分析分析,回归分析分析:矩阵逆上的矩阵倒立,求解非元素平等的方法,差异和差异化方法,差异和差异化方法,差异和差异性方法差异化方法,差异差异和差异化方法差异化方法和差异方法。相关分析。单元2:应用力学和设计工程机制:自由图和平衡;摩擦及其应用,包括滚动摩擦,Belt-Pulley,刹车,离合器,螺丝千斤顶,楔子,车辆等。;桁架和框架;虚拟工作;平面运动中刚体的运动学和动力学;冲动和动量(线性和角度)以及能量配方;拉格朗日方程。材料力学:应力和应变,弹性常数,泊松比; Mohr的圆圈,用于平面应力和平面应变;薄缸; shear force and bending moment diagrams;弯曲和剪切应力;剪切中心的概念;梁的挠度;圆形轴的扭转;欧拉的

Claudio Chamon教育:研究经验
•德国的体育社会(Deutsche Physikalische gesellschaft -DPG)会议,德国雷根斯堡,德国邀请演讲:“分数拓扑绝缘子”•波士顿地区碳纳米科学(培根)日,波士顿,波士顿,波士顿,邀请谈话:“驱动的石墨烯是一种可调的仪表式和托架物质•俄罗斯的圣彼得堡邀请演讲:“弹性膜下的非理性的人”•麦克斯 - 彭型式f的physik physik komplexer Systeme,德累斯顿,德国,关于“旋转Orbit纠缠的旋转量子状态:Extronic Systems中的量子状态的异国情调状态”计数问题的复杂性”•布朗大学研讨会:“分数拓扑绝缘子”•西班牙研讨会的马德里材料学院:“驱动石墨烯是具有拓扑特性的可调半导体”
2025; 15(6): 2375-2392. doi: 10.7150/thno.102730 研究论文 DLGAP5 通过 MYC st 调节糖酵解来增强膀胱癌化学抗性
1. 武汉大学中南医院泌尿外科,武汉 2. 武汉大学中南医院泌尿外科湖北省重点实验室,武汉 3. 武汉大学中南医院放射科,武汉 4. 武汉大学中南医院湖北省人类遗传资源保藏中心生物样本库,武汉 5. 中关村欧拉科技,北京 6. 北京大学生命科学学院定量生物学中心,北京 7. 中国医学科学院武汉传染病肿瘤研究中心,武汉 8. 武汉大学医学研究所,免疫与代谢前沿科学中心,泰康生命与医学科学中心,武汉 9.

普莱斯工程学院 - BIOE 3590 力学...
1. 简介 1.1. 材料力学在设计中的作用 1.2. 材料行为和失效模式 2. 材料的弹性和非弹性行为 2.1. 单轴载荷下的线性弹性行为 2.2. 非线性和非弹性行为 2.3. 屈服准则 2.4. 断裂机制 3. 生物系统中材料的力学行为 3.1. 钢材 3.2. 混凝土 3.3. 木材 3.4. 骨骼 3.5. 柔性材料 3.6. 其他材料 4. 梁的弯曲分析 4.1. 梁的适用性 4.2. 梁挠度方程 4.3. 挠度分析方法 5. 柱的稳定性分析 5.1. 结构的稳定性 5.2. 欧拉公式 5.3. 侧向支撑 5.4. 柱设计 6. 结构分析中的能量方法简介(可选) 6.1. 应变能 6.2功能法 6.3. 卡斯蒂利亚诺定理
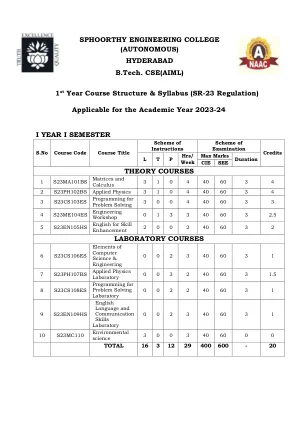
5-syllabus-1700469682.pdf
单位 - I:通过梯形形式和正常形式的矩阵矩阵等级,高斯 - 约旦方法的非单个矩阵倒数,线性方程系统:求解高斯消除方法的均匀和非均匀方程的系统,高斯·塞德尔迭代方法。UNIT - II: Eigen values and Eigen vectors Linear Transformation and Orthogonal Transformation: Eigen values, Eigenvectors and their properties, Diagonalization of a matrix, Cayley-Hamilton Theorem (without proof), finding inverse and power of a matrix by Cayley -Hamilton Theorem, Quadratic forms and Nature of the Quadratic Forms, Reduction of Quadratic form通过正交转换为规范形式。单元-III:微积分平均值定理:Rolle的定理,Lagrange的平均值定理,其几何解释和应用,Cauchy的平均值定理,Taylor的系列。确定积分的应用在评估曲线旋转的表面区域和体积(仅在笛卡尔坐标中),不当积分的定义:beta和伽马功能及其应用。单位-IV:多变量计算(部分分化和应用)的定义极限和连续性。部分区分:Euler的定理,总导数,Jacobian,功能依赖性和独立性。应用程序:

自主太阳能无人机中的光伏发电和电化学存储建模
开发了一种简单、高效的模拟器,用于预测光伏能的产生及其在锂离子电池中的存储,该模拟器适用于四翼自主无人机,机翼上覆盖有基于薄膜砷化镓光伏电池(III-V)的太阳能电池板。该模拟器可以预测太阳能电池板产生的有效光伏功率以及无人机飞行时的电池组电压。辐照度、太阳倾斜角和无人机欧拉角等飞行参数被视为输入参数。测得的光伏功率和电池组电压与模拟值高度一致,这使得 XSun 公司可以实际使用。这项参数研究显示了气候和地理条件对无人机自主性的影响。在晴天最佳天气条件下,无人机飞行时间可持续 12 小时。