XiaoMi-AI文件搜索系统
World File Search SystemHWIL

ALR-69A 雷达预警接收器 (RWR)
执行摘要 • 空军作战测试与评估中心 (AFOTEC) 于 2012 年 5 月 18 日至 7 月 16 日完成了 IOT&E。飞行测试在内华达州法伦靶场训练中心和佛罗里达州埃格林空军基地的多光谱测试与训练环境中进行,总威胁暴露时间为 12 小时。该系统在 IOT&E 期间总共记录了 204 小时的运行时间。• DOT&E 评估该系统在操作上不有效,但在操作上适用。该系统在操作上无效,因为它不能持续向机组人员提供及时准确的威胁信息,并且系统表现出随机威胁符号分裂缺陷。当系统接收到一个威胁信号在驾驶舱显示屏上以不同的方位角产生多个威胁符号时,就会发生威胁符号分裂。这降低了机组人员对所显示威胁的“真实”程度以及这些真实威胁所在位置的态势感知能力,并抑制了机组人员及时对威胁做出适当反应的能力。DOT&E 评估的详细信息在 DOT&E 的机密 IOT&E 报告中提供,该报告于 2012 年 10 月发布。• 尽管空军系统计划办公室 (SPO) 和雷神公司进行了硬件在环 (HWIL) 测试以证明威胁信号分离缺陷已得到解决,但 DOT&E 认为 HWIL 测试本身不足以验证缺陷已得到解决,并且软件更新不会导致任何其他不良系统性能。

2024 年航天工业日
网络靶场 交付网络防御环境代表 (CyDER) 基线能力 OW 靶场 向临时承包商主管交付靶场控制系统 (RCS) MVP 交付 TETRA 1 和 SBSS TACON • 于 2024 年 EW 靶场交付 RCS RMCC - Rm 106" 交付快速能力终端 (RCT) 1 和 2 交付 TROC 2-4 • ASTRO-E 第二阶段 SRR 和 PDR AP HWIL 设施 授予任务合作伙伴试验台合同
ALR-69A 雷达预警接收机 (RWR)
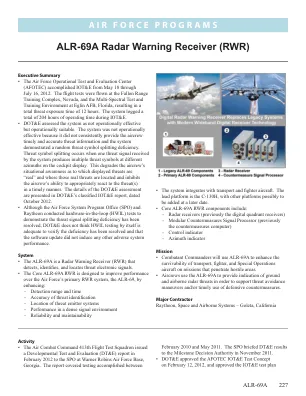
执行摘要 • 空军作战测试与评估中心 (AFOTEC) 于 2012 年 5 月 18 日至 7 月 16 日完成了 IOT&E。飞行测试在内华达州 Fallon Range 训练中心和佛罗里达州 Eglin 空军基地的多光谱测试与训练环境中进行,总威胁暴露时间为 12 小时。该系统在 IOT&E 期间总共记录了 204 小时的运行时间。 • DOT&E 评估该系统在操作上不有效但操作上适用。该系统在操作上无效,因为它无法持续及时准确地向机组人员提供威胁信息,并且系统表现出随机威胁符号分裂缺陷。当系统接收到一个威胁信号并在驾驶舱显示器上以不同的方位角产生多个威胁符号时,就会发生威胁符号分裂。这会降低机组人员对显示的威胁是“真实”的以及这些真实威胁位于何处的态势感知能力,并抑制机组人员及时对威胁做出适当反应的能力。 DOT&E 评估的详细信息在 DOT&E 2012 年 10 月的机密 IOT&E 报告中介绍。• 尽管空军系统计划办公室 (SPO) 和雷神公司进行了硬件在环 (HWIL) 测试以证明威胁信号分离缺陷已得到解决,但 DOT&E 并不认为 HWIL 测试本身足以验证缺陷已得到解决,并且软件更新不会引起任何其他不利的系统性能。

意大利航天局 - Navisp
国家 GNSS 能力中心 • 为履行该机构的法定使命,即定义和控制空间产品和服务的质量参数,ASI 打算配备一个导航能力中心,以便实现特定的试验台,用于认证新的 GNSS 接收器和技术及其诊断。 • 该中心将包含实验室仪器和完整的开发和测试环境(具有建模和仿真能力),以在 HWIL 和 SWIL 模式下测试新的接收器和导航算法,利用 ASI 已经完成的各种开发计划的成果并使用数字孪生环境。 • 该中心还将作为 ASI 导航计划生产的所有产品和设备的存储库,以及处理导航各项任务获取的数据的中心。
研究文章固定的指导、导航和控制...
本文的目的是开发一种既具有垂直起飞 (VTOL) 能力又具有固定翼飞机能力的固定翼飞机。为了实现这一目标,开发了一种带有两个螺旋桨的固定翼旋翼机原型,其旋翼可以像无人机一样机动,同时还具有类似直升机的垂直起降能力。这项研究为旋翼机提供了制导、导航和控制算法。首先,本研究描述了固定翼飞机的动力学及其控制输入,即油门、桨叶螺距和推力矢量。其次,分析了来流速度、作用在旋翼叶片上的力以及影响旋翼速度的因素。然后,给出了旋翼、双引擎、机翼以及垂直和水平尾翼的数学模型。随后,设计了使用全球处理系统 (GPS) 模块的飞行控制策略。检查的参数包括姿态、速度、高度、转弯和起飞控制。最后,基于硬件在环 (HWIL) 的仿真证明了导航制导和控制机制的有效性和稳健性。仿真证实,所提出的新机制是稳健的,并满足任务要求。旋翼机在整个飞行过程中保持稳定,并有效地操纵指定路径。

下一代 NASA 危险探测系统开发
I. 简介 用于精确和安全着陆的制导、导航和控制 (GN&C) 技术对于未来机器人科学和载人探索太阳系各个目的地的任务至关重要。这些进入、下降和着陆 (EDL) 技术是美国宇航局精确着陆和危险规避 (PL&HA) 领域的一部分,被认为是空间技术发展路线图 [1] 的高优先级能力,旨在促进和实现新的任务概念。SPLICE 项目,即安全精确着陆 - 综合能力演进 [2],致力于持续开发传感器、算法和航空电子设备,以用于未来的月球着陆任务。具体来说,SPLICE 正在完善着陆器下降过程中的地形相对导航 (TRN) 和危险检测与规避 (HDA) 的传感器硬件和软件的技术就绪水平 (TRL)。 SPLICE 的所有工作主要基于 NASA 先前在 PL&HA 领域的项目,例如 ALHAT [ 3 – 6 ]、COBALT [ 7 – 10 ] 和 LVS [ 11 ],其中包括多年的传感器开发工作 [12–15] 和各种亚轨道飞行测试。SPLICE 是一套用于精确着陆的 GN&C 技术。表 1 中列出的各个组件可以单独飞行,也可以作为着陆器承载的集成有效载荷飞行。NASA 兰利研究中心开发的导航多普勒激光雷达 (NDL) 提供厘米级的精确速度和测距。NASA 戈达德太空飞行中心开发的危险探测激光雷达 (HDL) 可生成预定着陆目标周围区域的高分辨率数字高程图 (DEM)。 TRN 系统包括摄像头、机载地图和 TRN 算法,这些算法由查尔斯·斯塔克·德雷珀实验室公司为 SPLICE 项目开发和实施 [16]。NASA 喷气推进实验室开发的危险检测算法基于参考文献 [17] 中概述的 ALHAT 算法,并进行了一些修改,以便与新型高清激光雷达 DEM 配合使用并在新型下降和着陆计算机 (DLC) 上运行。约翰逊航天中心开发的 DLC 是一种新型航空电子设备设计,正在开发中,以利用高性能航天计算 (HPSC) 处理器 [18, 19]。随着用于 TRN 和 HDA 的 GN&C 硬件和软件的不断成熟,该项目还在开发高精度模拟环境,包括带有 DLC 的硬件在环 (HWIL) 测试平台和一些在环传感器模拟器。此外,SPLICE 正在对机器人和载人任务的 EDL 架构进行详细建模 [ 20 , 21 ],以确定未来需求,揭示现有技术差距,并推动传感器技术发展,使即将到来的任务受益,例如 NASA 的 Artemis 和商业着陆器有效载荷服务 (CLPS) 计划。图 1 是主机飞行器上 SPLICE 有效载荷的高级示意图。TRN 和 HDA 的图像处理需要大量计算,因此 DLC 的设计旨在通过处理大部分视觉导航算法来减轻主飞行计算机的负担。在 DLC 上运行的飞行软件利用 NASA 核心飞行