XiaoMi-AI文件搜索系统
World File Search SystemHilal

Fahriye Hilal Halicioglu、Seckin Koralay 增材制造方法在建筑项目中的适用性分析
“自动化”一词源于古希腊语“auto”,意为自行运作。从逻辑上讲,“建筑自动化”意味着建筑无需人工干预即可自行完成。为了更广泛地描述它,Castro-Lacouture [1] 将其定义为“一种技术驱动的简化施工流程的方法,旨在提高安全性、生产率、可施工性、进度或控制,同时为项目利益相关方提供快速准确的决策工具。”20 世纪初,随着大规模生产系统 [2] 的出现,其他大型制造业(汽车、航空航天、造船等)的自动化技术开始转向建筑行业。起初,建筑元素被简化为预制部件并在施工现场组装。尽管如此,在这种方法中,自动化水平仍然局限于“场外”制造。组装过程主要由人工完成。现场施工自动化最早出现于 20 世纪 70 年代的日本,由被称为“五大”的大型建筑公司(清水建设、大成建设、鹿岛建设、大林组和竹中建设)投资使用机器人技术。现场施工自动化的发展主要源于人口老龄化,其次是因为年轻一代认为建筑工作困难、肮脏且危险 [3],对施工工作没有吸引力。出于这些原因,人们提出了两种主要方法。首先,开发了“单任务施工机器人”,通过执行诸如油漆、抹灰和铺陶瓷砖等非常具体的任务来取代施工现场的工人。其次,通过“施工自动化系统”进一步改进机器人系统,该系统旨在通过协调由单任务施工机器人支持的各种子系统实现全面自动化。这两个概念的主要重点是预制建筑部件的现场自动组装。尽管如此,整个机器人过程仍然是通常复杂的人类工作链的复制,而且对预制部件的依赖也带来了自身的缺点,例如需要为标准化(单调)元素建立专门的场外生产网络 [4]。在这一点上,增材制造 (AM) 方法有一些互补的方面和支持建筑自动化的潜力,因为它可以让机器人直接从原材料中高效地生产定制的建筑部件 [5]。AM 技术最初出现在 20 世纪 80 年代 [6]。Charles Hull [7] 开发了第一台 AM 机器,称为立体光刻,以替代注塑成型技术(一种成型制造方法),他使用后者来制造金属零件。这种成型技术成本高昂,耗时长,因为需要为每个不同的部件制作一个新模具 [8] 。他的新系统依靠紫外线敏感流体的自动凝固,通过以下方式形成 3D 物体

基于临床生物标志物Ozhan 1,Fatma Hilal Yagin 2 1 1 1
在这项研究中,它的目的是根据机器学习(ML)对癌症进行分类,并通过使用前列腺癌患者使用危险因素来确定最重要的风险因素。使用了100例前列腺癌患者的临床数据。使用随机森林(RF)算法创建了一个预测模型,以对前列腺癌进行分类。使用平衡子采样通过蒙特卡洛交叉验证(MCCV)获得模型的性能。在每个MCCV中,使用样品的三分之二(2/3)来评估该特征的重要性。为了评估模型的性能,计算了ROC曲线(AUC)标准(包括预测类概率和混淆MATRIX)下的模型,准确性,灵敏度,正面预测值,负预测值,F1评分和面积。检查结果时,从RF模型获得的灵敏度,特异性,正预测值,负预测值,准确性,F1得分和AUC值分别为0.89、0.84、0.77、0.93、0.86、0.86、0.83和0.88。区域,周长和质地是区分前列腺癌的三个最重要的风险因素。结论,当RF算法可以成功预测前列腺癌时。由RF模型确定的重要风险因素可能有助于前列腺癌患者的诊断,随访和治疗研究。

揭开特朗普的隐藏议程
德黑兰 - 在亚足联冠军联赛精英2024/25年的高风险戏剧中,伊朗的巨大巨车波斯波利斯发现自己处于斗争中。在与强大的Al Hilal遭受4-1的失利后,Persepolis的淘汰赛阶段的道路缩小了,这使他们对阵Nassr的比赛不仅是一场比赛,而且是一个决定性的时刻。与阿尔·希拉尔(Al Hilal)的比赛敏锐地提醒了这场精英竞赛中波斯波利斯面临的挑战。尽管表现良好,但伊朗方面仍无法跟上Al Hilal的节奏和精确性,Al Hilal表现出了令人信服的4-1 Vic Tory的主导地位。这种损失使Persepolis摇摇欲坠,而他们目前在锦标赛中站在第9位,只有前八支球队前进。
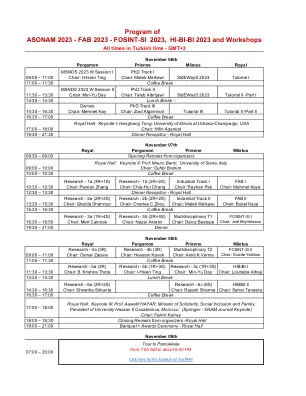
Alvar 2023-Intintin 203,2023和Valo 203和视频,// B // BVers?
Laura Lalondre,Zineb Farahat,Nabila Zrira,Kamal Marzouki,Azar Abdeljelil,Mohamed Hannat,Ikhlass Serraji,Wassim Jwalla,Wassim Jwalla,Imane Hilal,Imane Hilal,Ibtissam Benmilud,Nabil ngote and Ngote和Kawtar Megdichtar diveclight dickgdiche divecl divectar dickegtar

通讯作者:Hilal Özbek 电子邮箱:ozbek@atauni.edu.tr 引用本文:Yesilyurt, F., Özbek, H., Hacımüftüoğlu ME, Coşkun, AN, Dumlu, A
癌症被定义为全球死亡率较高的重大疾病之一(Aydın 和 Köseoğlu,2022 年)。癌症是一种可以影响我们体内任何器官或组织的疾病,它源于我们身体自身细胞因各种原因而发生的转变。癌症最显著的特征是异常细胞获得快速且不受控制地分裂的能力,不受限制地侵入附近的组织和器官,并且通过血液扩散到远处的器官和组织。癌症最常见的死亡原因是转移。虽然有许多已知的癌症病因,但目前对癌症也有许多未知数。大约 30% 的癌症可以通过简单的措施预防。许多类型的癌症,如肺癌、乳腺癌、结直肠癌、喉癌和胃癌,在早期诊断时可以得到治疗(Özyiğit,2017 年)。此外,癌症患者正在寻找除现有治疗方案之外的许多新治疗方案。

阿米尔向国王查理三世表示祝贺 - 多哈 - 卡塔尔论坛报
距卡塔尔首次在中东和阿拉伯世界举办世界杯仅剩十周多一点的时间,路萨尔体育场为 77,575 名球迷举办了一场难忘的足球和音乐之夜。球迷们从四面八方蜂拥而至,参观这座令人惊叹的场馆,这里将于 12 月 18 日卡塔尔国庆节举办 FIFA 世界杯决赛。在埃及超级巨星 Amr Diab 演唱热门歌曲后,Al Hilal 和 Zamalek 展开了激烈角逐,争夺路萨尔超级杯。在沙特阿拉伯和埃及两支卫冕冠军之间进行的一场艰苦的比赛中,Al Hilal 最终在 90 分钟的比赛结束后以 1-1 战平,通过点球大战以 4-1 获胜,夺得了冠军奖杯。最高交付和遗产委员会秘书长 Hassan Al Thawadi 表示:“路萨尔超级杯是又一个
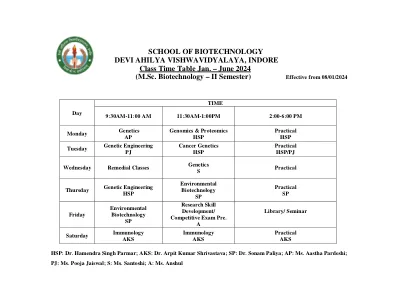
2024年6月(M.Sc. Biotechnology - II学期)
HSP:博士Hamendra Singh Parmar;惠普:先生苛刻的潘查尔; AU:先生Ajay Umaale; ST:博士Sandeep Tiwari; YC:先生Yash Chouhan;法:先生Faizan Ahmad Hilal; PJ:MS。 Pooja Jaiswal;答:MS。 anshul

人工智能在抗震建筑设计中的应用:使用深度学习和 ImageAI 方法确定不规则结构体系 Kaan Bingöl 1 , Aslı Er Akan 2* , Hilal Tuğba Örmecioğlu 3 , Arzu Er 4
1 比利希姆创新中心,METU Technopolis,安卡拉 06510,土耳其 2 恰卡亚大学,建筑学院,建筑系,安卡拉 06530,土耳其 3 阿克德尼兹大学,建筑学院,建筑系,安塔利亚 07070,土耳其 4 阿克德尼兹大学,技术职业高中,安塔利亚 07070,土耳其 重点:图形/表格摘要 人工神经网络和深度学习方法 估计结构不规则性的新方法 深度学习和图像处理方法在抗震建筑设计中的应用 图 A. 图形摘要目的:本研究的目的是通过使用深度学习和图像处理方法,创建一个不规则控制助手 (IC Assitant),它可以为建筑师提供有关结构系统决策是否符合抗震规定的一般信息,这些信息可在设计过程的早期阶段通过深度学习和图像处理方法进行。这样,在设计的早期阶段就能做出正确的决策,并防止在实施项目阶段可能发生的意外修改。理论与方法:在本研究中,我们提出了一个不规则控制助手 (IC Assitant),它可以为建筑师提供有关土耳其地震规范中定义的结构系统不规则性的一般信息,它是使用深度学习和图像处理方法开发的。PYTHON 是学术领域最常用的编程语言之一,PYTHON IDLE(集成开发和学习环境)用于创建应用程序。Image AI 工作库用于制作此软件产品。结果:向 IC 助手展示了以前没有给过机器的新计划,并询问这些计划中的结构系统是否按照地震法规的定义是规则的还是不规则的。结果表明,DK 助手可以成功地提供有关任何结构系统的规则性百分比的信息。结论:研究表明,深度学习和图像处理方法可用于在建筑设计过程的早期阶段发现结构不规则性。

引用Black,M。J. W.,Broke,B.的B. Graft,N。The,Aure,J.,A.,Agustinus,S.,W。W. to,…(2023年)。 featibilile
Maurice J.W.Zwart,医学博士, *†Bram van den Broek,MSC,MSC,‡Nine de Graaf,MD, *†§JoséA。A. Suurmeijer,MD,PhD,PhD, *†Simone Augustinus,MD, *†W. W. te Riele,Md,Md,Md,Md hjalmar C. in, in, in, in, in, in, in, in, in, in, in, in, in, in, in, in, in, in, in, in, in, in, in, in, in, in, in, in, in, in, in, in, in, in, in, in, in, in, in, in, in, in, in, in, in, in, in, in, in, in, in, in. H.M.医学博士Borel Rinkes,博士,∥Jacob L. van Dam,医学博士,博士,‡Kosei Takagi,MD,PhD,博士tran,医学博士,‡詹妮弗·施雷恩玛克(Jennifer Schreinemakers),医学博士,博士Ignace H.J.T.de Hingh,医学博士,博士,** Jan S.D.Mieog,医学博士,博士,†Bert A. Bonsing,MD,PhD,PhD,†Daan J. Lips,MD,PhD,PhD,‡Mohamed Abu Hilal,MD,MD,FRCS,FRCS,老师,§§§§oulivierR.Busch,MD,MD,MD。 Jorn,Saint-Mar,†,Saint-Mar,Saint-Mar,Saint-Mar,Saint-Mar,Saint-Mar,Saint-Mar,Saint-Mar,Saint-Mar,Saint-Mar,Saint-Mar,Saint-Mar,Saint-Mar,Saint-Mar,Saint-Mar,Saint-Mar,Saint-Mar,Saint-Mar,Saint-Mar,Saint-Mar,Saint-Mar,Saint-Mar,Saint-Mar,Saint-Mar,Saint-Mar,Saint-Mar,Saint-Mar,Saint-Mar,Saint-Mar,Saint-Mar,Saint-Mar,Saint-Mar,Saint-Mar,i. Melissa E. Hogg,医学博士,*** Bas G. Koerkamp,医学博士,博士Mieog,医学博士,博士,†Bert A. Bonsing,MD,PhD,PhD,†Daan J. Lips,MD,PhD,PhD,‡Mohamed Abu Hilal,MD,MD,FRCS,FRCS,老师,§§§§oulivierR.Busch,MD,MD,MD。 Jorn,Saint-Mar,†,Saint-Mar,Saint-Mar,Saint-Mar,Saint-Mar,Saint-Mar,Saint-Mar,Saint-Mar,Saint-Mar,Saint-Mar,Saint-Mar,Saint-Mar,Saint-Mar,Saint-Mar,Saint-Mar,Saint-Mar,Saint-Mar,Saint-Mar,Saint-Mar,Saint-Mar,Saint-Mar,Saint-Mar,Saint-Mar,Saint-Mar,Saint-Mar,Saint-Mar,Saint-Mar,Saint-Mar,Saint-Mar,Saint-Mar,Saint-Mar,Saint-Mar,Saint-Mar,i. Melissa E. Hogg,医学博士,*** Bas G. Koerkamp,医学博士,博士

QCE24 技术论文计划最终议程
量子技术与系统工程 (QTEM) 最佳论文 – 第二名 – 获奖 星期四上午主题演讲 468 – 使用交替偏置辅助退火对可调传输量子比特进行精确频率调整 Xiqiao Wang (Rigetti Computing)、Joel Howard (Rigetti Computing)、Eyob Sete (Rigetti Computing)、Greg Stiehl (Rigetti Computing)、Cameron Kopas (Rigetti Computing)、Stefano Poletto (Rigetti Computing)、Xian Wu (Rigetti Computing)、Mark Field (Rigetti Computing)、Nicholas Sharac (Rigetti Computing)、Christopher Eckberg (Rigetti Computing)、Hilal Cansizoglu (Rigetti Computing)、Raja Katta (Rigetti Computing)、Josh Mutus (Rigetti Computing)、Andrew Bestwick (Rigetti Computing)、Kameshwar Yadavalli (Rigetti Computing)、David Pappas (Rigetti (计算)