XiaoMi-AI文件搜索系统
World File Search SystemHutchinson

弗雷德哈钦森癌症中心
经营活动产生的现金流量: 净资产变化 $ 73,802 430,118 将净资产变化与经营活动提供的(使用的)净现金相协调的调整: 折旧和摊销 80,175 51,357 非现金递延收入变化 (1,468) (717) 投资未实现公允价值的变化 (104,802) (52,772) 投资已实现公允价值的变化 12,826 (646) 权益分割协议价值的变化 (2,051) (825) 掉期工具公允价值的变化 (4,321) (8,462) 债务解除损失 — 1,151 非现金捐款 (62,475) (38,834) 限制性捐款 (20,030) (18,025) 资产和负债变化:合同应收款 (5,055) 27,678 患者应收款 (3,966) (13,880) 应收票据及质押 20,739 (394,516) 其他资产 (21,896) 13,665 用途受限的资产 — 73,930 应付账款及应计负债 29,808 23,438 使用权资产及租赁负债变动 (4,383) 2,237
Seth Hutchinson Curriculum Vitae
•开发了佐治亚州技术研究所的课程:⋄CS8803RMP机器人运动计划⋄CS8803毫米移动操作(与Frank Dellaert教授一起)•佐治亚州理工学院课程讲师,佐治亚州技术研究所:⋄知识和机器人概论(CS 3630)•Inlino Intropotion of Intropotic of Illice of Illino Inlino Inlino Inlino Inlino Inlino Inlino In Iloice of Illinois:550⋄550⋄550⋄550⋄550⋄550。机器人技术(与教授Mark Spong和Narendra Ahuja)⋄ECE379机器人感应(与Narendra Ahuja教授一起)•伊利诺伊大学课程讲师:⋄机器人学简介(ECE 470)(ECE 470)⋄高级机器人计划(ECE 550)优化(ECE 550)⋄控制系统(ECE 486)⋄控制系统(ECE 486)(ECE 51)(ECE 51)(ECE 51)(ECE 51)(ECE 51)(设计和设计)(设计和设计)(设计和设计)(设计和设计)(设计和设计)(ECE 486)(ECE 486)(ECE 486)(ECE 486)(设计)(ECE 486)。 490) ⋄ Senior Design Laboratory (ECE 445) ⋄ Introduction to Computing Systems (ECE 190) ⋄ Analog Signal Processing (ECE 210) ⋄ Computer Engineering I (ECE 290) ⋄ Probability with Engineering Applications (ECE 313) ⋄ Logic Design (ECE 462) ⋄ Engineering Ethics (ECE 316) • Tutorials ⋄ “Visual Servo Control,” 9th Summer School on Image and Robotics 2008,IFMA,校园Des Cezeaux,法国⋄“ Visual Servo Control”,Centro de Invessivaci´On En Matem´aticas,墨西哥Guanajuato,2月(2月) 2008)⋄“视觉伺服控制”,IEEE Int'l Conf。关于机器人技术和自动化,1996年“不确定性下的多传感器融合:贝叶斯方法和dempster-shafer理论”,在IEEE int'l conf上给出。关于智能系统的多传感器融合和集成,1994年•简短课程:⋄机器人不足的机器人,Universit`A di Roma“ La Sapienza”,罗马,意大利,意大利,冬季,2016年。⋄机器人技术中的概率方法⋄荷兰系统与控制学院(DISC)暑期学校的视觉伺服控制和路径计划讲座,有关医学机器人技术的动态和控制方法,2011年6月。⋄ “Visual Servo Control,” Centro de Investigaci´on en Matem´aticas, Guanajuato, Mexico (Aug. 2009) ⋄ “Visual Servo Control,” Centro de Investigaci´on y de Estudios Avanzados del Instituo Polit´ecnico Nacional, CINVESTAV, Saltillo, Mexico, (Feb. 2009) ⋄ Robot Motion Planning, a four week graduate course given at Tecnol´ogico de Monterrey,校园Estado de M´exico,2005年6月⋄机器人和计算机视觉,这是一门三天的短期课程,该课程是通过伊利诺伊大学的持续工程教育办公室提供的,1993年夏季(Ponce教授)

E -Mobility -Hutchinson Precision密封系统
在我们的客户应用程序中具有深入的专业知识,我们的团队提供了完整的支持:从定制解决方案的材料配方和设计到内部制造业。通过内部管理流程的每个步骤,我们确保了卓越的质量,一致性和更快的周转时间。
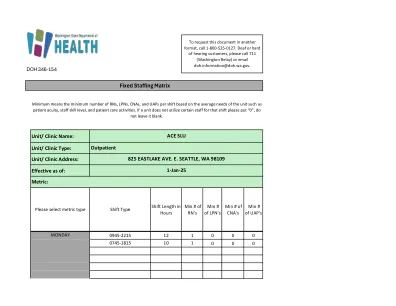
2025年1月1日,弗雷德·哈钦森癌症中心医院人员配备计划
要以另一种格式请求此文档,请致电1-800-525-0127。聋哑人或听力障碍的客户,请致电711(华盛顿接力赛)或发送电子邮件至doh.information@doh.wa.gov。

雌激素蛋白是一种孕激素的抑制剂,可以减轻Hutchinson – Gilford progeria综合征
摘要:Hutchinson – Gilford Forperia综合征(HGPS)是一种超稀有的人类早熟疾病,由于心脏病而导致死亡。几乎所有HGP的病例都是由LMNA基因的异常剪接引起的,该基因的剪接导致突变层层粘连蛋白A蛋白称为后代蛋白。在我们先前的研究中,已经证明对雌激素的治疗可降低雌雄蛋白的表达并改善体外和体内HGPS模型的衰老表型。在此记录中,心脏参数(中风量(SV),射血分数(EF),分数缩短(FS)等),该小鼠用超声心动图(在不同年龄在38周到50周)中喂食的是媒介物饮食或雌激素饮食,然后分析了心脏功能。我们还获得了LMNA WT/WT和LMNA G609G/WT
2024年4月16日报告标题:气候紧急更新,环境政策更新和生物多样性关税报告:Anneliese Hutchinson,Inte
a。请注意独立环境审核的结果b。请注意碳监测报告摘要c。请注意,朝着我们的气候和环境可持续性目标发展的持续活动(附录2)。d。请注意理事会的生物多样性义务,并同意理事会活动的生物多样性报告e。建议完整的理事会批准对理事会环境政策的修订措辞(附录3)。背景2。在2019年宣布气候紧急情况(附录1)之后,采用了2021年理事会运营的气候行动计划,以及2022年盖茨黑德(Gateshead)在2022年采用气候策略,以减轻气候变化的影响,通过减少发射和保护我们的社区来使其通过使其更加易于造成的影响来造成更大的影响。提案3。环境政策于2021年2月批准了理事会的环境政策。遵循对该政策的审查,有一项提议进行一些修正,以更好地使该政策与宣布气候紧急行动和气候行动计划(2021年)和气候战略(2022)(2022)。修正的措辞(附录3中的列出)主要澄清,碳还原目标与“碳中立性”而不是“净零”有关,这允许碳抵消碳的抵消,并且“清洁”能量是指“低碳”能量为我们的雄心提供了清晰度。4。环境中的投资者审核

缓解人乳头瘤病毒疫苗犹豫
来自华盛顿座位的弗雷德·哈钦森癌症研究中心公共卫生科学学院哈钦森癌症研究所1研究所。 2北卡罗莱纳州教堂山的北卡罗来纳大学全球公共卫生学院健康行为系,北卡罗来纳州教堂山; 3宾夕法尼亚州宾夕法尼亚州宾夕法尼亚州医学院公共卫生科学系; 4宾夕法尼亚州宾夕法尼亚州宾夕法尼亚州宾夕法尼亚州医学中心的宾夕法尼亚州立癌症研究所; 5 UNC Lineberger综合癌症中心,北卡罗来纳大学北卡罗来纳州教堂山的北卡罗来纳大学; 6公共卫生领导计划,UNC Gillings全球公共卫生学院,北卡罗来纳州教堂山教堂山的北卡罗来纳州大学的大学;和7 Safechild倡导中心,北卡罗来纳州罗利的Safechild倡导中心地址:Parth D. Shah,Pharmd,Pharmd,博士,Hutchinson癌症成果研究所,公共卫生科学司,Fred Hutchinson Cancer Research Center,Fairview Avenue North 1100电子邮件:pshah@fredhutch.org。 0749-3797/$ 36.00 https://doi.org/10.1016/j.amepre.2021.02.009电子邮件:pshah@fredhutch.org。0749-3797/$ 36.00 https://doi.org/10.1016/j.amepre.2021.02.009

内容 - 爱尔兰税务评论
编辑 Julie Burke 编辑委员会 Michael Ryan(主席)、Julie Burke、Helen Byrne、Fiona Carney、Amanda-Jayne Comyn、Gabrielle Dillon、Eddie Doyle、Kim Doyle、John Fisher、Anne Hogan、Carol Hogan、Séamus Kennedy、Tom Maguire、Lorraine Mulligan、George Thompson。版权所有 © 爱尔兰税务研究所 2022。保留所有权利。本出版物的任何部分不得复制。 出版者/发起者 爱尔兰税务研究所,地址:都柏林 2 大运河港长船码头南区 电话 +353 1 663 1700 taxinstitute.ie 编辑:Aisling Flood 排版:Deanta Global Publishing Services 设计和布局:Deanta Global Publishing Services 制作联络人 Judy Hutchinson 广告商请联系 Judy Hutchinson 电话 +353 1 663 1700 jhutchinson@taxinstitute.ie

AACR 癌症差异进展报告 2024
Christopher I. Li 医学博士、哲学博士 教务事务和多样性副总裁 Helen G. Edson 乳腺癌研究讲座教授 转化研究项目和流行病学项目教授 弗雷德哈钦森癌症中心 多样性、公平性和包容性副主任 弗雷德哈钦森/华盛顿大学癌症/西雅图儿童联盟研究 流行病学系全职教授 华盛顿大学,西雅图 华盛顿州西雅图

生物仿制药:十年经验和未来方向改善生物仿制药采用的策略和临床药理学的潜在作用
Yow-Ming Wang,博士 美国食品药品管理局临床药理学办公室生物仿制药和治疗性生物制品副主任 Yow-Ming Wang 博士目前担任 FDA 临床药理学办公室生物仿制药和治疗性生物制品副主任。她领导的治疗性生物制品项目旨在通过制定明确的政策、提高审查质量、促进知识共享、建立合作与拓展,促进生物产品开发中的科学和监管卓越性。 Gary Lyman,医学博士,公共卫生硕士,FACP,FRCP(爱丁堡),FASCO 教授;弗雷德哈钦森癌症研究中心公共卫生科学部和临床研究部癌症预防项目高级主管;哈钦森癌症结果研究所卫生保健质量与政策教授和兼职教授;华盛顿大学和杜克大学医学院公共卫生与药学系 Lyman 博士是弗雷德哈钦森癌症研究中心公共卫生科学与临床研究教授,同时还是哈钦森癌症结果研究所医疗质量与政策高级主管。他还是华盛顿大学和杜克大学医学院医学教授和公共卫生与药学副教授。