XiaoMi-AI文件搜索系统
World File Search SystemIPPW

HSEEP 常见问题 2020
• 什么是综合准备规划研讨会 (IPPW) 和综合准备计划 (IPP)?综合准备规划研讨会 (IPPW) 是一个定期会议,旨在制定演习计划的策略和结构,以及更广泛的准备工作,同时为单个演习的规划、实施和评估奠定基础。综合准备计划 (IPP) 是一项综合综合准备周期各要素的努力计划,旨在确保管辖区/组织有能力应对威胁和危害。
综合防备规划研讨会指南
概述 制定有效的基于能力的备灾计划始于制定综合备灾计划 (IPP),该计划确定了总体备灾优先事项,并概述了旨在解决这些优先事项和验证能力的多年备灾活动计划。综合备灾规划研讨会 (IPPW) 为利益相关者提供了一个互动论坛,让他们参与制定 IPP。IPPW 还用于协调各组织的备灾活动,以最大限度地利用资源并防止重复工作。由于资源有限和预算限制,人们认识到并非所有优先活动都能完成。因此,所有适当的利益相关者都必须参加研讨会,以促进所需的协调。
战略方向 2029 变革-1 - 纽约州 DMNA
2。dmna是一个人民优先组织。作为领导者,我们绝不能忘记我们的成员是最宝贵的资源,而他们的承诺和牺牲使我们能够完成我们的州和联邦任务。今年,我们雇用了由来自各种专业的初级预防专家组成的全职综合预防劳动力(IPPW),以帮助领导力和NYNG成员减少危险因素,从而导致有害行为并增加和促进保护因素。IPPW是国防部计划的一部分,该计划确定了预防有害行为所需的差距和资源,包括性侵犯,骚扰,家庭虐待,虐待儿童和自杀。主要预防是领导责任,我们必须始终支持和促进整个形式的健康行为。

灯塔 2024 年 10 月 - 三月空军预备役基地
加利福尼亚州马奇空军预备役基地 — 马奇空军预备役基地的综合初级预防工作队 (IPPW) 迎来了两位致力于增进军人和文职人员福祉的新专业人员。Kristen Kedar Wang 和 Ernie Zatino 对心理健康、预防和社区支持有着共同的热情,他们已准备好为马奇社区服务并保护其健康。加利福尼亚州马奇空军预备役基地 — 马奇空军预备役基地的综合初级预防工作队 (IPPW) 迎来了两位致力于增进军人和文职人员福祉的新专业人员。Kristen Kedar Wang 和 Ernie Zatino 对心理健康、预防和社区支持有着共同的热情,他们已准备好为马奇社区服务并保护其健康。
斯诺霍米什县 - 2023-2026 年综合防备计划
综合应急计划 (IPP) 目的和方法 本 IPP 作为综合应急管理计划的一部分,满足了我们社区和利益相关者的需求。斯诺霍米什县 IPP 概述了 SCDEM 支持的培训和演习 (T&E)。这些包括斯诺霍米什县各部门、ILA 附属管辖区和县内其他应急管理机构的 T&E 活动。斯诺霍米什县 IPP 的目的是指导该部门的培训和演习工作,以保持和提高应对所有危害所需的核心能力。SCDEM 根据各种输入确定未来几年安排哪些培训和演习,包括:行动后报告中需要改进的领域、新出现的需求和合作伙伴优先事项,以及支持计划、附件或附录的制定和更新周期。大部分优先排序发生在年度 IPPW 期间,在此期间,要求所有合作伙伴做好准备,讨论他们的准备差距和优先事项。2023 年 IPPW 的具体成果在本文件的附录 B 中描述。本 IPP 包括根据合作伙伴的意见制定的 2023-2026 年规划、培训和演习优先事项。此预测代表了准备周期中培训和演习的自然进展。
多年期培训和锻炼计划 (MYTEP)
KDHE 准备计划利用国土安全演习和评估计划 (HSEEP) 来评估准备能力的进展并确定需要改进的领域。MYTEP 的计划优先事项已根据国家准备指南、CDC 和 ASPR 规定的要求确定。优先事项也已根据先前提交的行动后报告和改进计划 (AAR/IP) 进行选择,这些报告和改进计划是根据地方和州演习以及现实世界事件制定的。在确定优先事项时,还考虑了危险脆弱性分析 (HVA)、管辖风险评估 (JRA) 以及州威胁和危险识别和风险评估 (THIRA)。MYTEP 概述了一系列逐渐复杂的演习以及相关的培训要求,这些演习解决了综合规划准备研讨会 (IPPW)(以前称为培训和演习规划研讨会 (TEPW))期间确定的优先事项。渐进式 MYTEP 使卫生部门和医疗保健组织能够参与一系列日益复杂的演习,旨在建立领域和能力的能力。每次连续的演习都将以以前演习中建立的技能和经验为基础。在 COVID-19 大流行期间,全州的地方卫生部门的员工流动率很高。由于这种高流动率,KDHE 准备计划已相应调整了规划预期。此外,每年都需要进行各种演习。培训要求已纳入工作计划,并安排了年度培训机会,以提高全州的能力并解决通过演习发现的不足之处。医疗保健联盟和公共卫生组织应利用从以前的演习和现实世界事件中获得的反馈,为即将到来的预算期确定培训和演习的优先顺序。还应根据此反馈修改准备计划、响应计划和恢复计划,然后重新测试以展示进展。KDHE 的目标是为该州的卫生和医疗部门配备所需的资源和技能,以在任何类型的事件或紧急情况下保护堪萨斯人的健康。
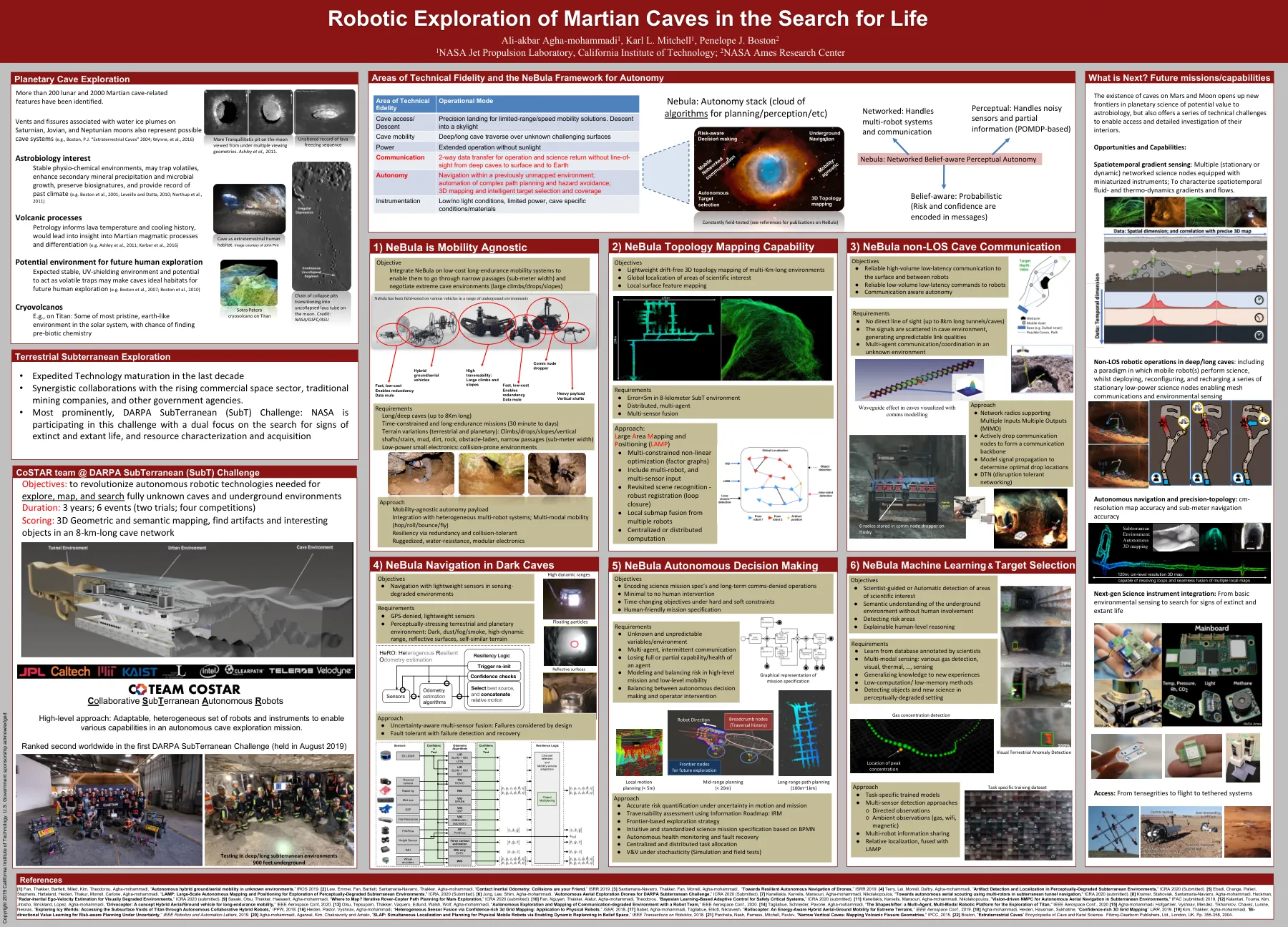
机器人探索火星洞穴寻找生命
[1] Fan,Thakker,Bartlett,Miled,Kim,Theodorou,Agha-Mohammadi,“自动杂种地面/未知环境中的空中移动性”,IROS 2019。[2] Lew,Emmei,Fan,Bartlett,Santamaria-Navarro,Thakker,Agha-Mohammadi,“接触惯性探测:碰撞是您的朋友,” ISRR2019。[3] Santamaria-Navarro,Thakker,Fan,Morrell,Agha-Mohammadi,“迈向无人机的弹性自动导航”,ISRR2019。[4] Terry,Lei,Morrell,Daftry,Agha-Mohammadi,“感知衰落的地下环境中的伪影检测和定位”,ICRA 2020(提交)。[5] Ebadi,Change,Palieri,Stephens,Hatteland,Heiden,Thakur,Morrell,Carlone,Carlone,Agha-Mohammadi。“灯:大规模的自主映射和定位,用于探索感知衰落的地下环境,” ICRA,2020年(提交)。[6] Jung,Lee,Shim,Agha-Mohammadi,“ DARPA地下挑战的自动空中勘探无人机”,ICRA 2020年(提交)。[7] Kanellakis,Karvelis,Mansouri,Agha-Mohammadi,Nikolakopoulos,“在地下隧道导航中使用多旋转器使用多旋翼的自主空中搜寻”,ICRA 2020(提交)。[8] Kramer,Stahoviak,Santamaria-Navarro,Agha-Mohammadi,Heckman,“视觉上降解环境的雷达惯性自我效率估计”,ICRA 2020(提交)。[9] Sasaki,Otsu,Thakker,Haesaert,Agha-Mohammadi,“在哪里映射?迭代的漫游者 - 弯曲器路径计划火星探索,” ICRA 2020(提交)。[10] Fan,Nguyen,Thakker,Alatur,Agha-Mohammadi,Theodorou。“基于贝叶斯学习的自适应控制对安全关键系统的自适应控制”,ICRA 2020(提交)。[11] Kanellakis,Karvelis,Mansouri,Agha-Mohammadi,Nikolakopoulos,“在地下环境中进行自主空中航行的视觉驱动的NMPC,IFAC(提交),[12],[12] [12]长期耐药性活动的概念混合空中/地面车辆。[13] Otsu,Tepsuporn,Thakker,Vaquero,Edlund,Walsh,Walf,Wolf,Agha-Mohammadi,“与机器人团队对贫困环境的自动探索和映射”[14] Tagliabue, Schneider, Pavone, Agha-mohammadi, “ The Shapeshifter: a Multi-Agent, Multi-Modal Robotic Platform for the Exploration of Titan, " IEEE Aerospace Conf., 2020 [15] Agha-mohammadi, Hofgartner, Vyshnav, Mendez, Tikhomirov, Chavez, Lunine, Nesnas, “探索冰冷的世界:通过自动协作混合机器人访问泰坦的地下空隙,” IPPW,2018。[16] Heiden,牧师,Vyshnav,Agha-Mohammadi,“通过置信度丰富的3D网格映射:应用于物理机器人的异质传感器融合:Iser,2018年。[17] SABET,AGHA-MOHAMMADI,TAGLIABUE,ELLIOTT,NIKRAVESH,“滚筒式:能源吸引能量的混合杂种空中地形迁移率对极端地形”,IEEE Aerospace Conf。,2019年。[18] Agha-Mohammadi,Heiden,Hausman,Sukhatme,“信心丰富的3D网格映射” IJRR,2019年。[19] Kim,Thakker,Agha-Mohammadi,“不确定性下的风险感知计划的双向价值学习”,IEEE机器人和自动化信,2019年。[21] Parcheta,Nash,Parness,Mitchell,Pavlov,“狭窄的垂直洞穴:映射火山裂缝几何形状”,IPCC,2015年。pp。[20] Agha-Mohammadi,Agarwal,Kim,Chakravorty和Amato,“ Slap:通过在信仰空间中启用动态重建的物理移动机器人的同时本地化和计划,”机器人技术的IEEE Transactions,2018。[22]波士顿,“洞穴和喀斯特科学的百科全书”。Fitzroy-Dearborn Publishers,Ltd。,英国伦敦。355-358,2004。