XiaoMi-AI文件搜索系统
World File Search SystemIWS

IWS 2025人类到火星IWS 2025人类到火星
名称纪律组织核心团队Cynthia null NESC博士领导LARC Donna DeNna Dempsey技术主管JSC Alan Hobbs博士Alan Hobbs人为因素Arc/ San Jose State University arc/ San Jose State University Foundation(SJSU)Kara Latorella博士LARC Ruthan Lewis Lewis Lewis Dr. Ingalls Industries Terrence Tyson Human Factors ARC Peter Robinson Intelligent Systems ARC Dr. Zhaofeng Huang Reliability and Statistics The Aerospace Corporation Marta Durham Space Flight Operations JSC/KBR Wyle Services, LLC Christopher Niemann Space Flight Operations JSC/KBR Wyle Services, LLC Thera Shear-Tungol Space Flight Operations JSC/KBR Wyle Services, LLC Mr. Andrew Chaikin太空历史学家兼作家Andrew Chaikin LLC学生实习生Megan Dempsey学生实习生佛罗里达州悉尼·休斯·巴尔德(Sydney Hughs Baird Austin Delahunt计划分析师LARC/MTSO BECKI HENDRICKS计划分析师LARC/MTSO评估支持Missy Strickland项目协调员LARC/AMA LINDA BURGESS计划和控制分析师LARC/AMA ERIN MORAN技术编辑LARC/AMA JONAY JONAY CAMPBEL TRARC/AMA JONAY CAMPBELL技术编辑LARC/AS&M
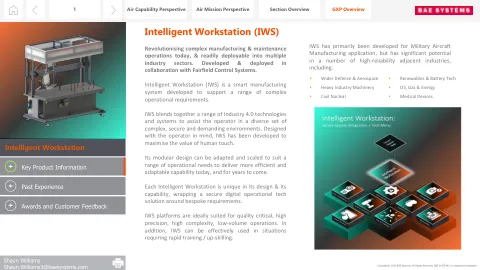
智能工作站 (IWS) - BAE 系统
IWS 融合了一系列工业 4.0 技术和系统,以协助操作员应对各种复杂、安全和苛刻的环境。 IWS 在设计时考虑到了操作员,旨在最大限度地发挥人性化的价值。
3D打印TiO2负电极,用于钠离子和...
长期(大本营,HAB,Art VIII+)3 https://ntrs.nasa.gov/citations/20240003016#:~: text=lunar%20Command%20Command%20AND%20Control%20Control%20Control%20 Interperability%20 Interperability%20(Lucciproject); %20 Overview%20%20LUNAR,COMBLECT%20Partners%2C%20和%20International%20Partners。

个人武器系统 (iws) 英里
仅授权 MILES 技术人员拆卸电池。注意:TSC 不接受任何潮湿、发霉的组件或运输箱。(句号)** 不遵守规定将导致 TSC 人员拒绝接受设备。打印:_____________________________ 签名:__________________________

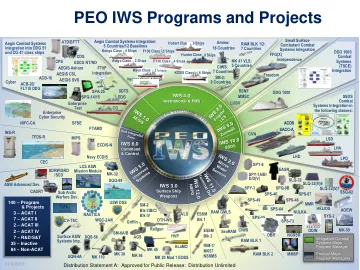
2023 PEO IWS 工业日
业务能力讨论 PEO IWS、SSP、SEA 00K、Tradewind、AEGIS TECHREP、SCSC Wallops Island 1:00 – 4:30
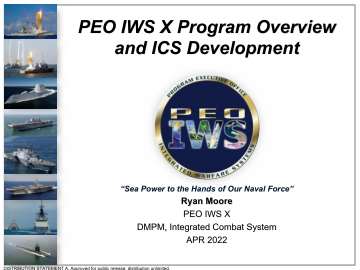
PEO IWS X 计划概述和 ICS 开发
n 单个能力交付的多个 NRE 账单 n 大型、整体式交付 n 定制硬件解决方案 n 多个 CS,不一定可互操作 n 不同的车队培训管道 n 不同的标准和流程 n 将不同的要求施加到元素上
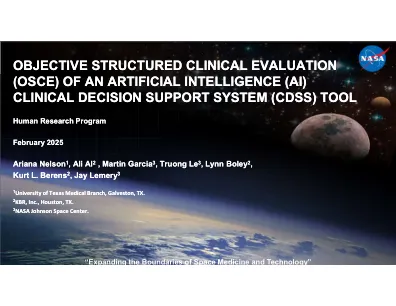
IWS 2025 OSCE for AI CDSS.pdf
[2] Kawamura,E.,Kannan,K.,Lombaerts,T。,&Ippolito,C。A.(2022)。基于视觉的精确方法和高级空气移动性的着陆。在AIAA Scitech 2022论坛(第0497页)中。[3] Oberkampf,D.,Dementhon,D。F.和Davis,L。S.(1996)。使用共面特征点迭代姿势估计。计算机视觉和图像理解,63(3),495-511。[4] Kawamura, E., Dolph, C., Kannan, K., Lombaerts, T., and Ippolito, C. A., “Simulated Vision-based Approach and Landing System Advanced Air Mobility,” AIAA SciTech 2023 Forum , AIAA-2023-2195, 2023.[5] Kawamura,E.,Dolph,C.,Kannan,K.,Brown,N.,Lombaerts,T。和Ippolito,C。A.,“基于VSLAM和VISISION ASS基于Vision的方法以及用于先进的空中移动性的方法,” AIAA Scitech 2023 Forum,2023年,第2023页,第2023页,p。 2196。

锂离子电池的功能涂料
*通过BMBF资助的项目“ Prosist”(FKZ 03XP0130A)与Fraunhofer FEP和Fraunhofer IWS合作实现了结果。有关研发请求,请联系:Fraunhofer有机电子,电子束和等离子体技术研究所(FEP),Winterbergstrasse,德国德累斯顿,Winterbergstrasse 28,01277。Claus Luber先生,电子邮件:claus.luber@fep.fraunhofer.de,电话:+49(0)351 2586 123