XiaoMi-AI文件搜索系统
World File Search SystemInitializing
Fortisase管理指南
更改日志7入门8要求8许可9初始化Fortisase 10简介11基于forticlient Agent的模式13 SWG无代理模式14专用公共IP地址14嵌入式板上登机指南15 FORTIFLEX许可18所需的服务和端口18选择可用性服务18个选择的服务端口18 SELECTION SELPESTIC dashboard 23 Resetting all dashboards 24 Drilling down on vulnerabilities 24 FortiView monitors 25 Adding a custom monitor 26 Resetting all monitors 26 Monitoring thin-edge bandwidth usage 27 Thin-Edge 28 Edge devices 30 FortiExtender 30 Prerequisites 30 Viewing notifications for a new FortiExtender 33 Configuring FortiExtender as FortiSASE LAN Extension 33 FortiGate 41 Prerequisites 42 Viewing notifications for新的Fortigate 42将Fortigate配置为Fortisase Lan扩展43 Fortiap 45先决条件46查看新Fortiap 47将Fortiap配置为Fortisase Edge设备48网络58 Secure Private Access 58

电池管理系统的扩展卡尔曼过滤...
混合电动车辆电池组中的电池管理系统必须估算该包目前的工作状况的值。其中包括:电池最新电池,电力褪色,容量褪色和瞬时功率。估计机制必须随着细胞的年龄而适应细胞特征的变化,因此在包装的寿命中提供了准确的估计值。在一系列三篇论文中,我们提出了基于扩展的卡尔曼过滤(EKF)的方法,这些方法能够实现锂离子聚合物电池组的这些目标。我们希望它们也将在其他电池化学上运作良好。这些论文涵盖了所需的数学背景,细胞建模和系统识别要求以及最终解决方案以及结果。第三篇论文结束了该系列的结论,其中列出了五个其他应用,在典型的BMS算法中可以使用EKF或EKF的结果:在车辆闲置之后的初始化状态估计值一段时间后的初始化;在估计值中估算具有动态误差界限的最新电荷;估计包装包/充电功率;跟踪更改包装参数(包括功率褪色和容量褪色)作为包装年龄,因此提供了对最新健康状况的定量估计;并确定必须均等的细胞。提出了包装测试的结果。©2004 Elsevier B.V.保留所有权利。

IIOE-2新闻通讯,第8卷,第1期,2024年1月-Incois
对印度夏季季风降雨(ISMR)的季节性预测已在将近一个世纪的时间尝试,这是由于其对印度经济的巨大用处和居民的生计。已经做出了许多努力,以增强ISMR预测的技能,并使用大气 - 海洋通用循环耦合模型,但成功率有限。海洋初始化一直是重要参数之一。此案例研究显示了ISMR的耦合预测系统(CFSV2)模拟中改善海洋初始条件(IC)的影响。CFSV2用作印度气象部(IMD)的ISMR季节性预测的操作动力学模型。在这里,我们使用基于全球海洋数据同化系统(GODAS)分析的新的改进的海洋IC来初始化CFSV2的海洋组成部分来展示提高的ISMR技能。这种新分析比NCEP Godas更好,后者使用了早期的海洋模型MOM4P0D,并使用3DVAR同化方案同化了观察到的温度和合成盐度。但是,新的改进的GoDas分析使用MOM4P1海洋模型,并吸收观察到的盐度而不是合成盐度。,我们进行了仅在IC中有所不同的几乎相同模型实验的双组集,其中一组使用NCEP IC,另一组使用新的IC(NIC)。NIC实验显示了更好的ISMR预测技能。改进的海洋IC导致了耦合反馈系统中的海洋和大气变量的实质性改善,从而有助于提高ISMR技能,如示意图

受人类情感感知机制启发的情感导向预训练探索
深度卷积神经网络(DCNN)的预训练在视觉情绪分析(VSA)领域起着至关重要的作用。大多数提出的方法都采用在大型物体分类数据集(即 ImageNet)上预训练的现成的主干网络。虽然与随机初始化模型状态相比,它在很大程度上提高了性能,但我们认为,仅在 ImageNet 上进行预训练的 DCNN 可能过于注重识别物体,而未能提供情绪方面的高级概念。为了解决这个长期被忽视的问题,我们提出了一种基于人类视觉情绪感知(VSP)机制的面向情绪的预训练方法。具体而言,我们将 VSP 的过程分为三个步骤,即刺激接受、整体组织和高级感知。通过模仿每个 VSP 步骤,我们通过设计的情绪感知任务分别对三个模型进行预训练,以挖掘情绪区分的表示。此外,结合我们精心设计的多模型融合策略,从每个感知步骤中学习到的先验知识可以有效地转移到单个目标模型中,从而获得显着的性能提升。最后,我们通过大量实验验证了我们提出的方法的优越性,涵盖了从单标签学习(SLL)、多标签学习(MLL)到标签分布学习(LDL)的主流 VSA 任务。实验结果表明,我们提出的方法在这些下游任务中取得了一致的改进。我们的代码发布在 https://github.com/tinglyfeng/sentiment_pretraining 。

想象、初始化和探索:多智能体强化学习中的有效探索方法
有效的探索对于在复杂的协调任务中发现多智能体强化学习 (MARL) 的最优策略至关重要。现有的方法主要利用内在奖励来实现承诺性探索,或者使用基于角色的学习来分解联合动作空间,而不是直接在整个动作观察空间中进行集体搜索。然而,它们在获取特定的联合动作序列以在长期任务中达到成功状态时经常面临挑战。为了解决这一限制,我们提出了想象、初始化和探索 (IIE),这是一种新颖的方法,为复杂场景中的高效多智能体探索提供了一种有前途的解决方案。IIE 采用变换器模型来想象智能体如何达到可以影响彼此转换函数的临界状态。然后,我们在探索阶段之前使用模拟器初始化此状态下的环境。我们将想象表述为序列建模问题,其中状态、观察、提示、动作和奖励是自回归预测的。该提示由剩余时间步长、剩余返回值、影响力值和一次性演示组成,用于指定期望状态和轨迹并指导动作生成。通过在关键状态下初始化智能体,IIE 显著提高了发现潜在重要且未被充分探索区域的可能性。尽管方法简单,但实证结果表明,我们的方法在星际争霸多智能体挑战赛 (SMAC) 和 SMACv2 环境中的表现优于多智能体探索基线。尤其值得一提的是,与其他生成方法(例如 CVAE-GAN 和扩散模型)相比,IIE 在稀疏奖励 SMAC 任务中表现出色,并且在初始化状态下生成了更有效的课程。

混合相空间中的慢量子热化和多体复兴
当系统的半经典相空间混合时,少体量子系统的弛豫在很大程度上取决于初始状态;即混沌运动区域与规则岛共存。近年来,人们付出了很多努力来理解强相互作用量子系统中的热化过程,这些系统通常缺乏明显的半经典极限。时间相关变分原理 (TDVP) 允许人们通过将幺正多体动力学投影到弱纠缠变分态流形上来系统地推导出有效的经典(非线性)动力系统。我们证明这种动力系统通常具有混合相空间。当 TDVP 误差较小时,混合相空间会在量子模型的精确动力学上留下痕迹。例如,当系统在属于稳定周期轨道或周围规则区域的状态初始化时,它会表现出持续的多体量子复兴。作为原理证明,我们确定了新型“量子多体疤痕”,即导致一维和二维相互作用的里德堡原子模型中长时间振荡的初始状态。有趣的是,导致最稳健复苏的初始状态通常是纠缠态。另一方面,即使 TDVP 误差很大,如在热化倾斜场伊辛模型中,在相空间的常规区域中初始化系统也会导致热化速度惊人地减慢。我们的工作确立了 TDVP 作为一种识别任意维度中具有异常动力学的相互作用量子系统的方法。此外,混合相空间经典变分方程允许人们在相互作用模型中找到缓慢热化的初始条件。我们的结果揭示了经典和量子混沌之间的联系,指出了经典的 Kolmogorov-Arnold-Moser 定理可能扩展到量子系统。
FRE-GY.6191 金融技术高级专题
第 1 周:HTML 和 Web 服务器定义的基本原理。 - 了解 HTML 代码创建的基础知识。 - 样式简介。 - 初始化 Web 服务器的教程。 - 项目第 0 部分:班级项目介绍。 第 2 周:为什么选择 Dash?金融数据可视化回顾。 - 使用 Python 进行 Web 开发的介绍。 - 创建动态 HTML 组件。 - 使用 Plotly 创建静态图形和图形。 - 项目第 I 部分:在 Web 应用程序中下载、格式化和呈现时间序列数据。 第 3 周:使用回调更新视觉输出第 I 部分。 - 超越 matplolib:使用 Plotly 进行动态数据可视化的介绍。 - 服务器和客户端回调和子例程介绍。 - 项目第 II 部分:添加最终用户请求数据和更新第 I 部分结果的能力。时间序列将包括更改时间段的能力,即:1 天、1 个月、1 年等。 第 4 周:使用回调更新视觉输出第 II 部分。 - 介绍 Plotly Dash 的布局组件和 Bootstrap - 创建一个响应式表单,允许用户根据输入采取不同的操作。 - 为昂贵的计算添加“记忆”。 - 项目第三部分:在第二部分中添加计算和蒙特卡罗模拟层。模拟结果将以图形方式显示收敛情况。 第 5 周:处理 Dash 的缺点。 - 实现具有多个输入和输出的回调。 - 学习处理影响相同输出的多个输入的请求。 - 学习处理需要相同输入和输出的情况。 - 学习处理尚未创建的组件。 - 项目第四部分:此时,该项目将包括最终用户在 MC 模拟中输入迭代次数的能力,如果重复请求,记忆应该会阻止它再次计算。 第 6 周:以干净的方式呈现数据。 - Dash DataTable 简介。 - 学习如何设置 DataTable 的样式并应用条件格式。 - 项目第五部分:向项目添加 DataTable 以显示 MC 结果。第 7 周:演示 - 项目演示。
WAM Arm – 用户手册 - Barrett 支持
1 系统描述 1.1 标准 WAM * 系统组件 1.1.1 系统功能 感谢您选择全臂机械手 (WAM)。WAM 旨在克服传统机械臂缺乏反向驱动能力的问题,同时保持耐用性、低功耗、轻移动重量和易用性。标准 WAM 是四自由度 (4- DOF) 臂。可选 WAM 腕部增加了三个自由度 - 请参阅第 1.2.1 节。WAM 灵活纤细,可轻松绕过路径上的障碍物,并具有流畅而精确的关节运动,这有助于 WAM 在机器人控制研究和新兴应用中的普及。紧凑、系统重量轻和极低功耗使 WAM 臂具有独特的便携性,因此是移动平台的理想选择。其重量轻且没有控制器柜,因此比同等尺寸的机械臂更容易安装。 WAM 还可以直接由移动平台上的小型电池供电,无需电源调节,电池可承受各种电压。虽然没有机械臂被认为是“安全的”,并且应根据每个应用的需求采取所有预防措施,但 WAM 的反向驱动能力和多层安全系统使其成为最安全的机械臂之一。由于其 95% 的反向驱动电缆驱动器(与反向驱动能力较差的齿轮和谐波驱动器相反),WAM 在接触墙壁和人时可以自然而轻柔地做出反应。这些属性使 WAM 成为手术和康复领域首批机械臂之一。我们希望您喜欢 WAM 的多功能性和实用性。请随时提供反馈并在需要时寻求建议。美国 +617-252-9000,support@barrett.com ,或 http://www.barrett.com/。 1.1.2 文档 WAM 附带六个独立的文档: 1. 用户手册(本手册) 2. 快速入门指南 3. WAM 电缆维护指南 4. 腕电缆维护指南 5. 惯性规格手册 6. 支持参考表 1. 用户手册(本手册)涵盖: • 系统组件和选项 • 安全说明 • 系统设置和操作 • 故障排除 • 技术规格 • 常见问题 2. 快速入门指南是一份单页指南,涵盖操作 WAM 的基本知识以及 WAM 的一些基本演示。其中包括打开和初始化 WAM、原点位置、故障恢复以及重力补偿和教学和播放演示。 *“Whole Arm Manipulator”和“WAM”是 Barrett Technology® Inc. 的商标。
有效的高通量方法利用机器学习原子电位来计算石墨烯 - 聚合物接口的相互作用能量*
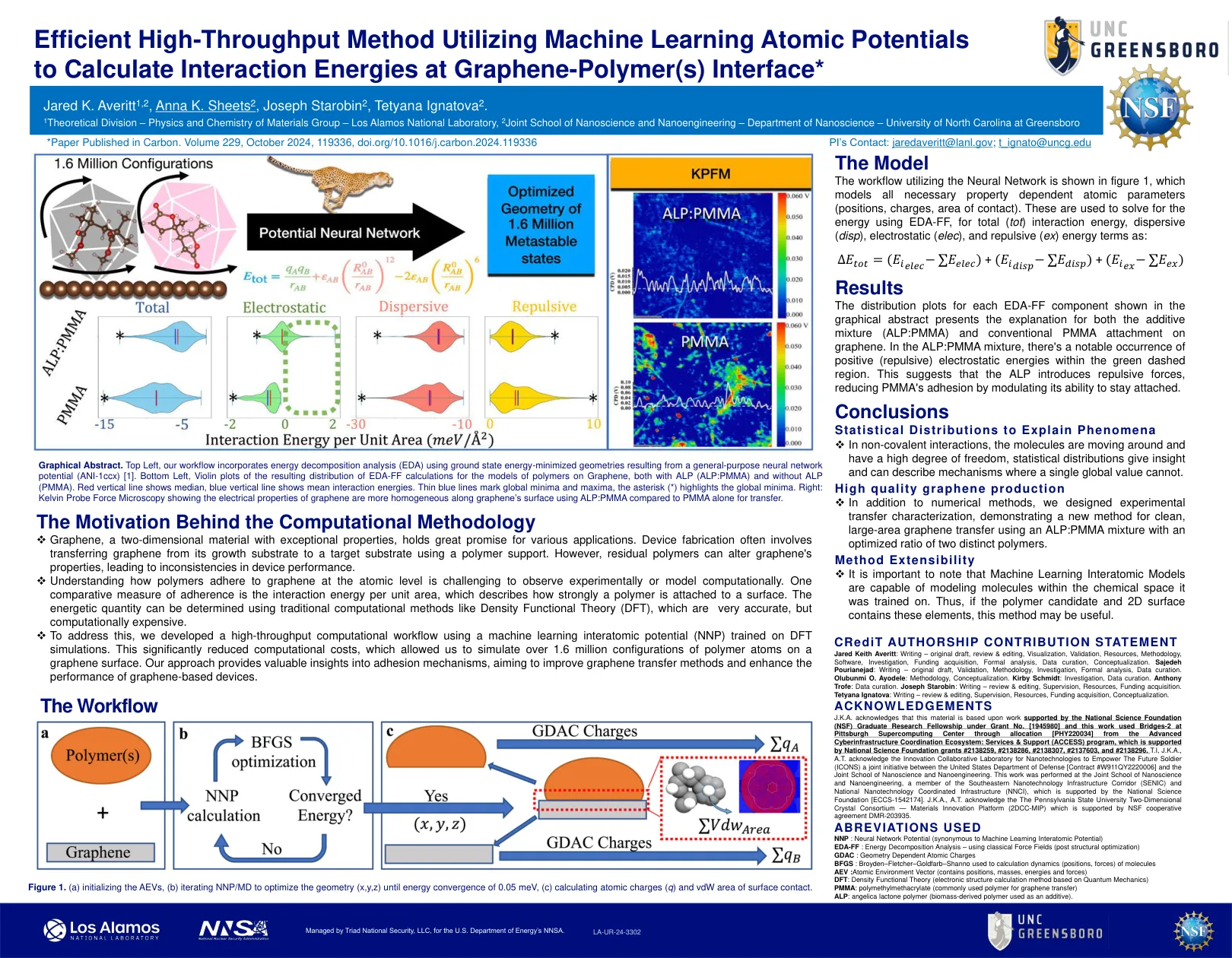
信用撰稿人贡献声明Jared Keith Averitt:写作 - 原始草案,评论,可视化,验证,资源,方法,软件,调查,资金获取,正式分析,数据策划,概念化,概念化。sajedeh pourianejad:写作 - 原始草稿,验证,方法论,调查,正式分析,数据策划。Olubunmi O. Ayodele:方法论,概念化。柯比·施密特(Kirby Schmidt):调查,数据策划。Anthony Trofe:数据策划。Joseph Starobin:写作 - 评论和编辑,监督,资源,资金获取。 Tetyana Ignatova:写作 - 审查和编辑,监督,资源,资金获取,概念化。 致谢J.K.A. 承认,该材料基于国家科学基金会(NSF)研究生研究奖学金的工作, [1945980]和这项工作在匹兹堡超级计算中心使用了桥梁-2通过分配[PHY220034],来自高级网络网络基础结构协调生态系统:服务与支持(访问)计划,由国家科学基金会#2138259,#2138259,#2138286,21386,#2133330,及#21333303.60,由国家科学基金会支持 T.I,J.K.A.,A.T。承认纳米技术的创新合作实验室赋予未来士兵的权力(ICONS),美国国防部[合同#W911QY2220006]与纳米科学和纳米工程联合学校之间的共同计划。 图1。Joseph Starobin:写作 - 评论和编辑,监督,资源,资金获取。Tetyana Ignatova:写作 - 审查和编辑,监督,资源,资金获取,概念化。致谢J.K.A.承认,该材料基于国家科学基金会(NSF)研究生研究奖学金的工作,[1945980]和这项工作在匹兹堡超级计算中心使用了桥梁-2通过分配[PHY220034],来自高级网络网络基础结构协调生态系统:服务与支持(访问)计划,由国家科学基金会#2138259,#2138259,#2138286,21386,#2133330,及#21333303.60,由国家科学基金会支持T.I,J.K.A.,A.T。承认纳米技术的创新合作实验室赋予未来士兵的权力(ICONS),美国国防部[合同#W911QY2220006]与纳米科学和纳米工程联合学校之间的共同计划。 图1。T.I,J.K.A.,A.T。承认纳米技术的创新合作实验室赋予未来士兵的权力(ICONS),美国国防部[合同#W911QY2220006]与纳米科学和纳米工程联合学校之间的共同计划。图1。这项工作是在纳米科学和纳米工程联合学校进行的,东南纳米技术基础设施走廊(SENIC)和国家纳米技术协调基础设施(NNCI)的成员,该基础设施(NNCI)得到了国家科学基金会[ECCS-1542174]的支持。J.K.A.,A.T。承认宾夕法尼亚州立大学二维水晶财团 - 材料创新平台(2DCC-MIP),该平台得到了NSF合作协议DMR-203935的支持。 使用NNP:神经网络潜力(机器学习的同义原子间潜在的同义)EDA-FF:能量分解分析 - 使用经典力场(结构优化后)GDAC:依赖性原子电荷BFGS:BROYDEN – FLOYDEN – FLOYDER-GLETCHER – FLETCHER-GOLDCHER-GOLDFARB – SHANNO ATSIS ATSIS ENTICAL DYMANSSSSSSSSSSS, (包含位置,质量,能量和力)DFT:密度功能理论(基于量子力学的电子结构计算方法)PMMA:聚甲基甲基丙烯酸酯(用于石墨烯转移的常用聚合物)ALP:Angelica Lactone Polymer(用于添加剂的生物量聚合物)。 (a)初始化AEV,(B)迭代NNP/MD优化几何(X,Y,Z),直到能量收敛为0.05 MeV,(C)计算表面接触的原子电荷(Q)和VDW面积。J.K.A.,A.T。承认宾夕法尼亚州立大学二维水晶财团 - 材料创新平台(2DCC-MIP),该平台得到了NSF合作协议DMR-203935的支持。使用NNP:神经网络潜力(机器学习的同义原子间潜在的同义)EDA-FF:能量分解分析 - 使用经典力场(结构优化后)GDAC:依赖性原子电荷BFGS:BROYDEN – FLOYDEN – FLOYDER-GLETCHER – FLETCHER-GOLDCHER-GOLDFARB – SHANNO ATSIS ATSIS ENTICAL DYMANSSSSSSSSSSS, (包含位置,质量,能量和力)DFT:密度功能理论(基于量子力学的电子结构计算方法)PMMA:聚甲基甲基丙烯酸酯(用于石墨烯转移的常用聚合物)ALP:Angelica Lactone Polymer(用于添加剂的生物量聚合物)。(a)初始化AEV,(B)迭代NNP/MD优化几何(X,Y,Z),直到能量收敛为0.05 MeV,(C)计算表面接触的原子电荷(Q)和VDW面积。

时间依赖性的单电子通过量子点传输
纳米结构中的时间依赖性现象对理解和控制其动态行为的兴趣越来越大。应用程序之一是量子计算,其中可以通过以可编程方式操纵粒子(Qubits)来以平行方式进行某种信息处理[1,2]。在某些物理系统中已成功证明了各种量子算法[3],并且在整合实用量子计算机所需的大量Qubits方面已经取得了进展,尤其是在SolidStatesystateSystateSystems中[4-9]。尽管跨性量表computermayrequire的巨大研究活动,但量子信息研究已经成功,因为提供了一种通用语言来与跨学科研究人员进行交流。量子型cannowbediscussedintermsofquantuminenformination Theory,它促进了物理学家,化学家,数学家和量子工程师之间的讨论。通常,任何将初始状态(密度算子)更改为最终状态的量子过程都可以通过完全阳性的痕量保护映射来描述[1]。对映射的知识用于定义量子信息过程。相同的映射提供了无脑摄取的iNteractractions。Quantumcomputation isbasedonanassemblyofunitaryoperations, whichcanbedecomposedintosomefundamental unitary operations on one- or two- qubit subsystems.因此,问题可以简化为几种单一操作员。实际上,现实的操作受到与量子系统耦合的环境的影响和降级,因此映射成为一个非整体量子过程[10]。降低系统相干性的两个重要量子过程是耗散的,其中量子系统的能量与环境交换,并进行dephasing,其中量子系统的相位由环境随机化。前者通常以纵向松弛时间(T 1)为特征,而后者则以横向松弛时间(T 2)为特征。此外,在与测量设备耦合下,测量过程也可以视为量子过程。量子计算需要一组完整的量子过程,以初始化所有量子位,执行一个和双Quit的单一操作,测量每个量子状态并避免出现非单一操作的错误[11]。纳米规模的固态设备中的量子动力学对于控制具有可编程量子过程序列的定制结构中的某些单个量子具有吸引力。具有约瑟夫森连接的超导电路成功证明了一个和两Q量的操作,具有高度的相干性[12,13]。可以通过设计设备参数和适当的脉冲序列来很好地与环境隔离。另一个系统是半导体量子点(QD),它提供可以用外部电压控制的人工电子状态。由于可以在半导体装置中设计和实际形成原子样电子状态,因此QD通常称为人工原子[14-17]。电子状态的高可控性可用于研究人工量子系统的动态行为以及量子计算系统的动态行为。有两个主要选择量子基础:单个QD中的自由度自由度和双量子点(DQD)中的电荷(轨道)自由度。在本文中,我们将回顾一些有关QD中的旋转和充电量子的研究,这些研究与量子信息处理和实际设备背后的物理现象有关。