XiaoMi-AI文件搜索系统
World File Search SystemMadhava
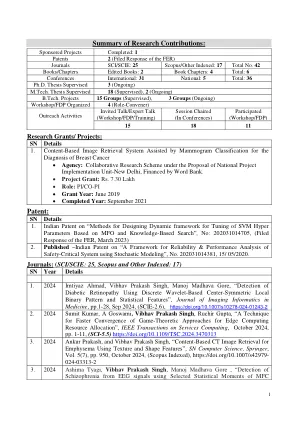
研究贡献摘要:专利:
SN 年份 详情 1. 2024 Imtiyaz Ahmad、Vibhav Prakash Singh、Manoj Madhava Gore,“使用基于离散小波的中心对称局部二值模式和统计特征检测糖尿病视网膜病变”,医学影像信息学杂志,第 1-28 页,2024 年 9 月,(SCIE-2.6),https://doi.org/10.1007/s10278-024-01243-2 2. 2024 Sumit Kumar、A Goswami、Vibhav Prakash Singh、Ruchir Gupta,“一种用于边缘计算资源分配的博弈论方法更快收敛的技术”,IEEE 服务计算学报,2024 年 10 月,第 1-11 页,(SCI-5.5) https://doi.org/10.1109/TSC.2024.3470313 3. 2024 Ankur Prakash 和 Vibhav Prakash Singh,“使用纹理和形状特征进行基于内容的肺气肿 CT 图像检索”,SN Computer Science,Springer,第 5(7) 卷,第 950 页,2024 年 10 月,(Scopus Indexed),https://doi.org/10.1007/s42979-024-03313-2 3. 2024 Ashima Tyagi、Vibhav Prakash Singh、Manoj Madhava Gore,“使用 MFC 的选定统计矩从 EEG 信号中检测精神分裂症
2025-01-27-Larsen-Toubro 宣布成为首选 EPC - ...
孟买,2025 年 1 月 27 日:L&T 的可再生能源垂直业务已被 Masdar 选为全球首个 24/7 太阳能光伏和电池存储千兆级项目北站的首选工程、采购和施工 (EPC) 承包商之一,该项目将在阿布扎比建设。阿联酋清洁能源领导者阿布扎比未来能源公司 PJSC - Masdar 与阿联酋水电公司 (EWEC) 合作,在阿布扎比可持续发展周 (ADSW) 上宣布,正在开发这个千兆级项目,能够全天候提供高达 1 千兆瓦 (GW) 的基本负荷电力。该项目将配备一个 5.2GW (DC) 太阳能光伏 (PV) 电站,并与 19 千兆瓦时 (GWh) 的 BESS 相结合,使其成为世界上最大的太阳能和 BESS 项目。该项目将包含一个北站和一个南站,各自的光伏容量分别为 2.6GW 和 9.5GWh。仪式在阿布扎比可持续发展周举行,阿联酋工业与先进技术部长兼马斯达尔董事长苏丹·贾比尔博士出席了仪式。授予书由马斯达尔首席运营官 Abdulaziz Alobaidli 先生和 L&T 高级副总裁兼可再生能源 IC 负责人 A Ravindran 先生在 L&T 全职董事兼高级执行副总裁(公用事业) T Madhava Das 先生的见证下签署。马斯达尔首席运营官 Abdulaziz Alobaidli 表示:“我们与 EWEC 共同开发的这个破纪录项目是清洁能源转型的一大进步,它克服了可再生能源的间歇性,能够全天候调度清洁能源。作为马斯达尔迄今为止规模最大、最雄心勃勃的项目,我们确保与最优秀的合作伙伴合作,以达到最高标准。我期待与这些首选承包商合作,在清洁能源创新领域树立新的全球标杆。” Larsen & Toubro 董事长兼董事总经理 SN Subrahmanyan 先生表示:“这种远见卓识加上明确的行动反映了阿联酋在加速可持续经济进步方面的领导作用。L&T 决心为全球能源转型带来先进的能力。” Larsen & Toubro 全职董事兼高级执行副总裁(公用事业)T Madhava Das 先生表示:“我们很高兴与马斯达尔的信任伙伴关系取得了如此丰硕的成果
covid-19-锻炼计划-疫苗演习-...
特别感谢世卫组织非洲区域办事处 (AFRO) 的同事;Balcha Girma Masresha 博士和 Mary Stephen 博士,感谢她们为演练包所做的技术贡献和前期工作。在开发该演练包的过程中,COVAX 的同事们做出了宝贵的技术贡献,其中包括:Benedetta Allegranzi 博士;Jhilmil Bahl 博士;Madhava Balakrishnan 博士;Adwoa Bentsi-Enchill 博士;Aleksandra Cario 博士;Diana Chang Blanc 博士;Carole Fry 博士;Shoshanna Goldin 博士;以及 Alice Simniceanu 博士;领导团队为 Ann Lindstrand 博士和 Ann Moen 博士。如何使用本指南 本指南列出了四种常见的演练,可与贵国的 COVID-19 疫苗接种计划结合使用。它由四个按顺序排列的元素组成,既可以用作独立的演练,也可以作为测试整个设置和交付程序的系统的一部分。演习计划包括以下内容:

当选研究员将于 2023 年 11 月 1 日起生效 工程科
当选院士将于 2023 年 11 月 1 日起生效 工程科 -I(土木工程) 1. TG Sitharam 教授,全印度技术教育委员会 (AICTE) 主席,新德里。 2. Indumathi M Nambi 教授,印度理工学院马德拉斯分校土木工程系环境工程教授,钦奈。 3. Deepankar Choudhury 教授,印度理工学院孟买分校土木工程系主任、T. Kant 教授讲座教授 (HAG),工程科 -II(计算机工程和信息技术) 4. Balaraman Ravindran 教授,计算机科学与工程系教授兼罗伯特博世数据科学与人工智能中心主任;印度理工学院马德拉斯分校,钦奈。 5. Utpal Garain 教授,印度统计研究所教授,加尔各答。 6. Sudeshna Sarkar 教授,印度理工学院 Kharagpur 分校计算机科学与工程系兼人工智能卓越中心教授。7. Madhava Krishna Krishnan 教授,海得拉巴国际信息技术学院机器人研究中心教授兼主任。8. Sreenivas Subramoney 先生,英特尔院士、英特尔公司处理器架构总监,班加罗尔。9. Ajai Chowdhry 先生,HCL 创始人、EPIC 基金会主席。10. Rajendra Singh Pawar 先生,NIIT 集团董事长兼联合创始人。11. Satya Narayana Nadella 先生,微软董事长兼首席执行官。工程部分 -III(机械工程) 12. Dilip Kumar Pratihar 教授,印度理工学院 Kharagpur 分校机械工程系学院院长教授 13. Kanakasabapathi Subramanian 博士,钦奈 Ashok Leyland Ltd. 产品开发高级副总裁。 14. Jaiteerth Raghavendra Joshi 博士,海得拉巴国防研究与发展实验室 (DRDL) 杰出科学家兼 LRSAM 项目主任 15. Nagahanumaiah 博士,班加罗尔中央制造技术学院主任。

samartha brahmbhatt
指导出版物1。“针对目标投掷的最终效力者的识别和学习控制” - Hasith Venkata Sai Pasala,Nagamanikandan Govindan和Samarth Brahmbhatt,IEEE Robotics and Automation and Automation Fetters,第1卷。9,不。11,pp。9558-9564,2024年11月2。“ Imagine2Servo: Intelligent Visual Servoing with Diffusion-Driven Goal Generation for Robotic Tasks ” - Pranjali Pathre, Gunjan Gupta, M. Nomaan Qureshi, Mandyam Brunda, Samarth Brahmbhatt , and K. Madhava Krishna, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2024 3.“ OpenBot-Fleet:与真实机器人进行集体学习的系统” - MatthiasMéuller,Samarth Brahmbhatt,Ankur Deka,Ankur Deka,Quentin Leboutet,David Hafner和Vladlen Koltun和Vladlen Koltun,国际机器人和自动化(ICRA)2024 4。“偷偷摸摸的人:偷偷摸摸的声学本地化” - 孟尤杨,帕特里克·格雷迪,萨玛斯·布拉姆布哈特,Arun Balajee Vasudevan,Charles C. Kemp,Charles C. Kemp和James Hays,Inter-National-National-National-National-National-National-National-inter-National-inter-National-national-inter-National-national-of Robotics and Automation and Automation(ICRA)20224 5。“基于触觉的对象插入政策的零射击” - 萨玛斯·布拉姆·伯特(Samarth Brahmbhatt),安卡尔·德卡(Ankur Deka),安德鲁·斯皮尔伯格(Andrew Spielberg)和马蒂亚斯·米勒(MatthiasMéuller),国际机器人和自动化会议(ICRA)2023 6。“压力之间:估算单个RGB图像的手压力” - 帕特里克·格雷迪,昌昌唐,萨玛斯·布拉姆·Bhatt,克里斯托弗·D·特里克,陈德·沃恩,詹姆斯·海斯,詹姆斯·海斯和查尔斯·肯普,欧洲计算机视觉会议(ECCV)2022(ORAL)7。“对软机器人抓手的视觉压力估计和控制” - 帕特里克·格雷迪,杰里米·A·柯林斯,萨玛斯·布拉姆·布拉特,克里斯托弗·D·特·特维格,昌昌唐,詹姆斯·海斯和查尔斯·C·坎普,IEEE/RSJ IEEE/RSJ国际智能机器人与系统(IROS)(IROS)2022 8。“联系人:优化联系以提高抓地力” - 帕特里克·格雷迪,郑昌,明·沃,克里斯托弗·D。“联系人:带有物体接触和手动姿势的grasps的数据集” - 萨马斯·布拉姆·汉特(Samarth Brahmbhatt),昌昌唐(Chengcheng Tang),克里斯托弗·D·特克格(Christopher D. Twigg),查尔斯·C·肯普(Charles C.“走向无标记的抓握捕获” -Samarth Brahmbhatt,Charles C. Kemp和James Hays,AR/VR计算机视觉的第三次研讨会,CVPR 2019 11.“ ContactGrasp:来自接触的功能性多手指掌握综合” - Samarth Brahmbhatt,Ankur Handa,James Hays和Dieter Fox,IEEE/RSJ国际智能机器人和系统国际会议(IROS)2019