XiaoMi-AI文件搜索系统
World File Search SystemMaeda

MAEDA实验室:2024–2025
参考文献[1] J. Li,A。Ito,H。Yaguchi和Y. Maeda:工业机器人操作器的同时进行运动学校准,定位和映射(SKCLAM),Advanced Robotics,第1卷。33,编号23,pp。1225–1234,2019。[2] A. Ito,J。Li和Y. Maeda:使用棋盘格式的猛击综合运动学校准,Proc。2020 IEEE/sice int。sammp。系统集成(SII 2020),pp。551–556,2020。[3] Y. Tanaka,J。Li,A。Ito和Y. Maeda:用球形摄像机用于工业操纵器的猛击综合运动型校准,Proc。JSME Conf。 关于机器人技术和机电一体化2020(Robomech 2020),2p2-B05,2020(日语)。 [4] JSME Conf。 制造系统部门2021,pp。 77–78,2021(日语)。JSME Conf。关于机器人技术和机电一体化2020(Robomech 2020),2p2-B05,2020(日语)。[4]JSME Conf。 制造系统部门2021,pp。 77–78,2021(日语)。JSME Conf。制造系统部门2021,pp。77–78,2021(日语)。

开发氟化物反应性酰胺键裂解设备,该设备可能适用于可追溯的链接器Jun Yamamoto,Nami Maeda,Chiaki
包括天然产物,肽和合成小型化合物在内的各种分子通过与靶向生物大分子的特定相互作用表现出其生物学活性。蛋白质在内,包括酶,受体和离子通道代表这些靶标的主要群体。鉴定与生物活性配体相互作用的未知蛋白靶标在化学生物学和药物发育领域已经是必不可少的。但是,这种研究方法是耗时且费力的。靶标识别包括一系列过程:(1)使用具有生物活性配体作为诱饵的靶标的靶; (2)钩靶的富集; (3)通过Edman退化或质谱法(MS)对目标进行序列分析。1对于第一步,照片 - 亲和力标记允许在光辐射时将诱饵共价为相应的目标,因为可能适用于低亲和力配体靶向对。1a,b,2然后将钩状靶标与生物素链接蛋白珠相互纯化的生物素化接头分子使用生物素 - 链霉亲蛋白相互作用链接。1,3

Bio Palette 通过重要任命增强领导团队:安藤和子 (Kazuko Ando) 出任执行官兼首席商务官,马场义则 (Yoshinori Bamba) 出任执行官兼首席运营官,
Bio Palette 通过重要任命增强领导团队:安藤和子 (Kazuko Ando) 出任执行官兼首席商务官,马场义则 (Yoshinori Bamba) 出任执行官兼首席运营官,前田真司 (Shinji Maeda) 出任审计师

检查点封锁的微生物组影响者...
引言微生物组是人类生理学的关键组成部分,它可以在组织中的微生物(例如胃癌睾丸(GI)区域,皮肤和肺部)中产生微生物(Dethlefsen等,2007; Ley等,2006)。许多微生物与宿主有共同的关系,对于障碍物的适当发展和功能至关重要(B.Ackhed等,2005; Hooper和Macpherson,2010)。微生物组有助于健康状况和疾病,例如癌症,肥胖和炎症状况,并影响宿主对治疗干预的反应(Cryan和Dinan,2012; Gopalakrishnan et al。,2018a; Maeda and Tebeda; Maeda and theeda; Maeda and thea and takeda,2019; rajili’c-Stojanovi al al al al ant; et eet eT; Al。,2008)。这已经充分证明了癌症,其中微生物组会影响对免疫疗法,化学治疗,放射治疗和干细胞移植的反应(Abu-Sbeih等,2019; Chang等,2021b; 2021b; DeRosa et al。 Taur等人,2014年,Tonneau等人,2021年;由于微生物组是可修改的,并且与造成恶性肿瘤的遗传变化相比,可能更适合改变,因此可以操纵其改善癌症结局的潜力促使人们对不存在的微生物组(宿主相互作用,它们对肿瘤生长的影响)以及与癌症治疗的相互作用引起了兴趣。免疫疗法是几十年来癌症护理中最重要的进步,将免疫反应重定向以影响耐用的肿瘤控制。免疫检查点抑制剂(ICIS)目标负

人工智能(AI)识别胰腺癌患者腹水中的生存相关因素......
注释1.中性粒细胞:一种白细胞。它可以对抗细菌和真菌等病原体,在保护身体免受感染方面发挥重要作用。 注2.巨噬细胞:一种白细胞。它们有能力吞噬和分解侵入人体的细菌和病毒等病原体以及不必要的细胞,并引发免疫反应。 注3.腹腔冲洗细胞学检查:一种病理检查,将生理盐水注入腹腔,制备标本,检查是否存在恶性细胞。若存在恶性细胞,则细胞学检查判定为阳性;若不存在恶性细胞,则细胞学检查判定为阴性。 注4. Vision Transformer:将在自然语言处理领域带来突破的具有注意力机制的Transformer应用于计算机视觉的模型。 [纸张信息]标题:深度学习使用腹膜阳性洗涤细胞学作者预测胰腺癌患者的1年预后:Noguchi Aya,Numata Yasushi,Sugawara takayori,Miura Hiromori,Konno kaori,konno Takayuki,Ariake Kyohei,Nakayama Shun,Maeda Shinpei,Otsuka Hideo,Mizuma Masamichi,Nakagawa Kei,Morikawa Kei,Akatsuka kei,Akatsuka Jun,Maeda jun,Maeda iChiro和病理学,东北大学医学院研究生院山本托Yoichiro,瑞肯高级情报项目中心病理信息学团队团队负责人(也是科学报告)发表于:科学报告
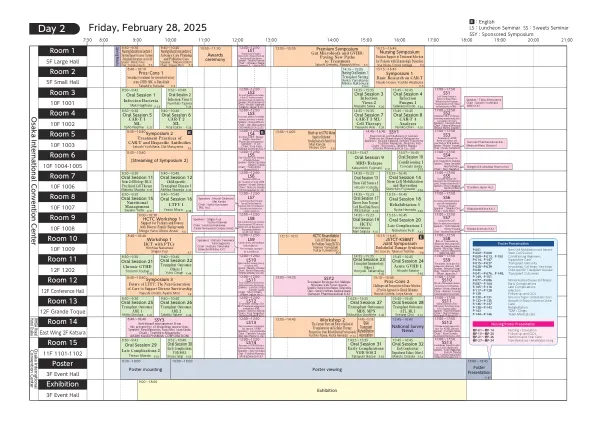
第 2 天 2025 年 2 月 28 日,星期五
SSY1 血液系统恶性肿瘤基因组医学的期望与挑战 演讲者:片冈圭介、福岛健太郎 演讲者:宫本敏宏、加藤基宏 主席:井筒浩二、前田贵宏(大塚制药株式会社)
培养人工智能和大数据时代的计算思维,实现数字社会
物联网运动不仅促进了计算机和技术的发展,还促进了设计的发展。根据 Young 和 Kijima (2019) 的说法,2010 年代初,由 John Maeda (2011) 领导的 STEM 教育向 STEAM 教育转变。他通过简单性来增强创造力,并培育了“美学 + 计算”设计师社区 (Maeda, 2004),并支持麻省理工学院的 Scratch 语言项目,该项目目前在全球使用。在 2000 年代,工商管理硕士 (MBA) 课程存在共性问题,创新型商业难以创建。因此,他创建了一个具有设计思维的新 MBA 课程,并与美国国会议员合作。 Young 和 Kojima 在图 3 中总结了新 MBA 课程中强调的设计思维与其他思维的区别。进入 MBA 课程的一项要求是 GMAT(研究生管理入学考试),该考试要求学生回答一道英语和数学的快速选择题,以检查成为 MBA 课程学生所需的简单快速决策技能。在英语和数学技能的基础上,他们学习如何在人工智能和大数据时代为第四次工业革命创造和管理创新业务。
设计经济2021论文3
设计和应用设计技能对业务有益,而交付创新的核心现在已被广泛接受。Design skills are evident in a range of ways that businesses innovate, from prominent design consultancies operating in the UK and internationally such as IDEO, Bluefrog and UsTwo, celebrated individuals such as the designers who co-founded Airbnb, to the design capabilities built into large businesses in different sectors such as IBM, Google Ventures and Proctor & Gamble, as well as offerings developed in professional services firms such as Accenture or麦肯锡经常通过收购设计公司(Maeda,2019年)。例如,一项研究表明,估值超过10亿美元的企业中有21%是由拥抱设计或来自设计,艺术或其他创意背景的人共同创立的(Maeda,2016年)。从Adjaye Associates到Wilkinsoneyre的不同规模的建筑公司也受到企业的参与,包括工业,公共和零售项目的一系列项目,从而创新了企业用户,利益相关者和公民如何体验建筑环境的创新。在这种情况下,过去20年中,人们已经看到了努力,以了解企业投资和使用设计师和设计师来帮助他们实现目标并评估所产生的结果(无论是意图和意外1)的情况。


使用优势蒸馏技术提高双场量子键分布的性能
在这项工作中,我们应用优势蒸馏方法来提高集体攻击下实用的双场量子键分配系统的性能。与Maeda,Sasaki和Koashi [自然通信10,3140(2019)]给出的先前的分析结果相比,通过我们的分析方法获得的最大传递距离将从420 km增加到470 km。通过将独立损失的未对准误差增加到12%,先前的分析方法无法克服率距离结合。但是,当未对准误差为16%时,我们的分析方法仍然可以克服率距离。更令人惊讶的是,我们证明,即使未对准误差接近50%,双场量子键分布也可以产生正面的安全密钥,因此我们的分析方法可以显着提高实用的双胞胎量子量子键分布系统的性能。