XiaoMi-AI文件搜索系统
World File Search SystemMoti
TE2022-01 - MoTI ITS 托管和软件 - Gov.bc.ca
政策 ITS 服务器及其上安装的软件必须符合交通部信息管理部门 (IMB) 确定的 ITS 托管和软件政策、标准和指南,这些政策、标准和指南反映并符合不列颠哥伦比亚省政府首席信息官办公室的政策、标准和指南。这些政策、标准和支持软件技术路线图的详细信息已作为本文档的附录提供。ITS 设计人员必须在智能交通系统软件头端组件的设计、开发和交付过程中考虑并适应本文总结和引用的所有标准和指南。如果拟议的解决方案无法与这些因素或提供的详细标准和指南相一致,则必须在第 3 阶段 - 初步设计结束之前寻求并获得豁免批准。术语和定义下表提供了本技术公告中使用的术语和首字母缩略词的上下文和清晰度。
MOTI SEZ 专家职责范围.pdf
i. 协助编写关于建立工业园区 (IP) 和经济特区 (SEZ) 的概念说明和实施手册 ii. 在选择建立 IP 和 SEZ 的地点方面提供专家建议。 iii. 在设计、编制规范和成本估算、编制实施模块(包括工业园区和经济特区计划的路线图)方面提供技术指导。 iv. 为 IP 和 SEZ 相关咨询研究和任务起草 ToR 立场文件、投资布局等提供技术援助 v. 在技术上协助该部的采购部门选择和授予加纳 IP 和 SEZ 计划的合同。 vi. 监督并在必要时提出建议,以修改合同,从而最大程度地提高“物有所值”。 vii. 与 IP/SEZ 团队合作,协调利益相关方的活动,以实现项目目标。 viii.管理部内各项举措(如工业园/经济特区、1D1F、SPX 和出口多样化)之间的互补机制,以实现这些举措的广泛目标,包括:工业发展、创造就业机会和改善民生。ix. 及时提供针对性的解决方案,加速工业园/经济特区项目的实施。x. 制定并实施吸引租户到工业园和经济特区的计划和战略。xi. 协调 MOTI-PIU 的运营,确保 MOTI TIA 实施的活动符合部的政策方向和优先领域。xii. 为 MOTI 顺利协调 GET 项目第 2 部分活动提供技术援助。xiii. 协助部内协调工业园/经济特区技术工作组的工作。xiv. 支持大库马西工业城项目和经济特区活动的协调与实施 xv.与 MOTI-IP&SEZ 工作人员协调履行 GKICP 各自的关键职责,以确保与其他区域的协同作用,提供互补服务,而不是区域之间的竞争。xvi. 参与制定和实施项目概念和方法,作为 IP&SEZ 项目总体实施的一部分。xvii. 起草向总局长/部长汇报的演示文稿 xviii. 履行部长可能分配的任何其他职责。
该表包含燃料的碳强度,这些燃料已由董事根据《低碳燃料法》第20(1)条批准。燃料产品
运输和基础设施部(MOTI)正在审查坎卢普斯地区的省级运输网络,以了解当前和未来的需求,并制定解决方案的战略。
解决土壤酸度并增强土壤健康
我们衷心感谢EAC秘书处的Fahari Marwa,Regina Kayitesi和David Wafula在制定本报告时的宝贵指导。我们深表感谢,来自布隆迪,刚果民主共和国,肯尼亚,卢旺达,南苏丹,坦桑尼亚和乌干达的代表,他们参加了2024年5月在肯尼亚内罗毕的为期2天的研讨会,于2024年5月在肯尼亚进行了针对土壤酸性的专业知识,知识知识,知识知识和经验,该报告贡献了该报告。这些是Marie-Chantal Niyuhir;雅克蕉够; John Kabue Mutombo; Stephane Mubilayi Mwamba;所罗门·塞尔索·库曼(Solomon Celso Kumudan); Alfred Sebit Lukudu Wani;戈德温·摩西·马科里(Godwin Moses Makori); Joel Loitu Meliyo;迈克尔·奥克蒂(Michael Okoti); Simon Muchigiri;詹姆斯·旺布(James Wambua); Alex Otut;和Kayuki Kaizzi。我们还感谢Pwani University的研究人员Esther Mwende,Moti Jaleta和来自国际玉米和小麦改善中心的Moti Jaleta和Samuel Gamda(Centro Interro Interro de MejoramientodeMaízY Trigo,或Cimmyt)。
征求意向书 (...
PforR 将支持贸易和工业部 (MOTI) 战略支柱产业计划下的三个重点行业以及 YOUStart 下的地区创业计划 (DEP) 的发展。该计划将持续五年,并将在全国范围内开展干预。它将侧重于三个成果领域:(1) 吸引投资;(2) 特定行业技能培训;(3) 青年主导的企业推广。PforR 的受益者包括投资者(国内外投资者)及其员工(其中 60% 估计年龄在 30 岁以下)、参加行业主导培训计划的年轻毕业生(其中至少 30% 为女性)、18-40 岁之间的年轻企业家(其中至少 50% 为女性,5% 为残疾人)及其员工。PforR 将通过员工和企业家的额外工资收入或业务利润间接惠及他们所支持的家庭。
NBCC/BSI/2024-25 WEB 03,2024
•NBCC的自我可持续模型 - 该公司也是Sarojini Nagar,Netaji Nagar和Narouji Nagar的GPRA殖民地重建的主要推动者,其中NBCC带来了零废物概念的所有可持续发展特征。该公司已经完成了重大项目,即德里新的Moti Bagh Gpra综合大楼,这是同类IGBC认证的绿色家庭综合体和GPRA East Kidwai Nagar Delhi,这是“零废物”可持续殖民地。公司最近已与喀拉拉邦住房委员会(KSHB),BHEL和高知地铁有限公司(KMRL)签署谅解备忘录,以开发和货币化土地包裹。

稳定、易于操作、完全自体电纺聚合物肽皮肤等效物,用于治疗严重烧伤
Dana Cohen-Gerassi 1,2,3 , Marina BenShoshan 4 , Adi Liiani 4 , Tomer Reuveni 5 , Offir Loboda 1,2,3 , Moti Haratz 4,6 , Josef Haik 4,6 , Itzhak Binderman 1 , Yosi Shacham-Diamand 3,7 , Amit Sitt 5* , Ayelet Di Segni 4* , Lihi Adler-Abramovich 1,2* 1 特拉维夫大学医学与健康科学学院 Goldschleger 牙科医学院口腔生物学系,特拉维夫 6997801,以色列 2 特拉维夫大学 Jan Koum 纳米科学与纳米技术中心,特拉维夫 6997801,以色列 3 特拉维夫大学材料科学与工程系,特拉维夫 6997801,以色列 4 绿色皮肤工程以色列特拉维夫,舍巴医疗中心,整形外科和重症监护烧伤科实验室,5 特拉维夫大学,雷蒙德和贝弗利赛克勒精确科学学院,化学学院,物理化学系,特拉维夫 6997801,以色列

文化响应式教学和大脑
文化反应性不是一种实践;这就是为我们的实践提供信息的原因,因此我们可以更好地教学选择,以引起,参与,倾向,支持,支持和扩大所有学生的智力能力。文化响应迅速的教学和大脑:促进真实的参与和严格的阐明了我们为什么Cul Ture是学习的基本势力的背后的神经科学。zaretta hammond trans这本科学将这一科学融入一个框架中,使教师能够建立关系并应用策略,以促进文化响应敏感的教学以优化学习,使我们能够真正地暗示有色人种的学生可以表现出广泛的学习能力,并能够证明高级知识表演,以及他们的自我确定性,以实现他们的成就。

寻求更安全的天空 – 航空安全报告 - SEBS
致谢 本报告是通过 先生进行的广泛调查研究而得以完成的。托亚·达哈尔.因此,我们要感谢并祝贺他撰写了这份报告。如果没有以下人士的大力支持,这项研究也是不可能完成的。我们感谢他们的慷慨捐助以及他们为这一事业投入的时间: 捐助者:Aayam Lamichhane Abhishek Basnyat Arun Adhikary Ashish Bajracharya Bhaba Thami Bipasha Rai Bindiya Rayamajhi Dechenla Sherpa Eva Sharma Jay Shrestha Kapil Mishra Lipi Chapagain Moti Gurung Paras B. Shah Pratikshya Bohra Prerana Shrestha Raxak Mahat Roshani Pandey Sachit Dhakal Sameer Maskey Sobhag Rana Subash Manandhar Ubin Malla Ujwal Khanal Upendra Bom 以下人士通过 Hemraj 信托基金捐款: Anjan Pandey Bharat Kandel Sandeep Shrestha Uddhav Sigdel Uttam Sharma
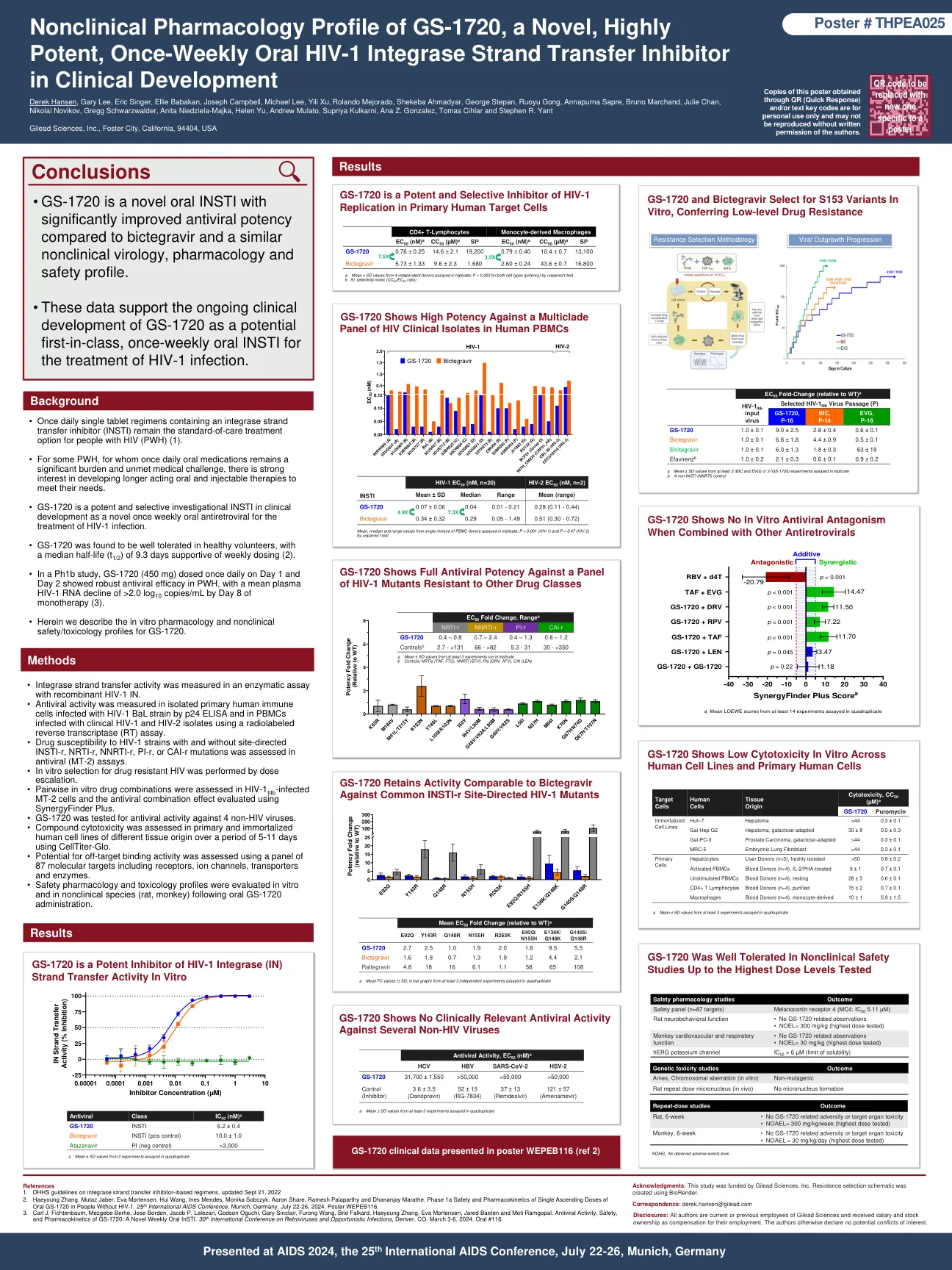
GS-1720的非临床药理学特征,一种新型,高度有效的,每周一次的口服HIV-1整合酶链转移抑制剂
参考文献1。DHHS集成酶链转移抑制剂方案的指南,于2022年9月21日更新Haeyoung Zhang,Mutaz Jaber,Eva Mortensen,Hui Wang,Ines Mendes,Monika Sobczyk,Aaron Share,Ramesh Palaparthy和Dhananjay Marathe。 没有HIV-1的人的单一升剂剂量的口服GS-1720的1A期安全和药代动力学。 25届国际艾滋病会议,德国慕尼黑,7月22日至26日,2024年。 海报WEPEB116。 3。 Carl J. Fichtebaum,Mezgebe Berhe,Jose Bordon,Jacob P. Lalezari,Godson Oguchi,Gary Sinclair,Furong Wang,Brie Falkard,Haeyoung Zhang,Eva Mortensen,Jared Baeten Baeten和Moti Ramgopal。 GS-1720的抗病毒活性,安全性和药代动力学:每周的新型口服研究所。 第30届国际逆转录病毒和机会感染国际会议,丹佛,20024年3月3日至6日。 口头#116。Haeyoung Zhang,Mutaz Jaber,Eva Mortensen,Hui Wang,Ines Mendes,Monika Sobczyk,Aaron Share,Ramesh Palaparthy和Dhananjay Marathe。没有HIV-1的人的单一升剂剂量的口服GS-1720的1A期安全和药代动力学。25届国际艾滋病会议,德国慕尼黑,7月22日至26日,2024年。海报WEPEB116。3。Carl J. Fichtebaum,Mezgebe Berhe,Jose Bordon,Jacob P. Lalezari,Godson Oguchi,Gary Sinclair,Furong Wang,Brie Falkard,Haeyoung Zhang,Eva Mortensen,Jared Baeten Baeten和Moti Ramgopal。GS-1720的抗病毒活性,安全性和药代动力学:每周的新型口服研究所。第30届国际逆转录病毒和机会感染国际会议,丹佛,20024年3月3日至6日。口头#116。口头#116。