XiaoMi-AI文件搜索系统
World File Search SystemPratham

swasthya pratham
1。偏头痛 /血管头痛2。< / div>尿液系统中的石头3。大型系统中的石头4。扁桃体 /腺样体手术5。< / div>任何类型的囊肿,结节,息肉6。任何类型的乳房肿块7。脊椎病/脊柱炎的治疗 - 任何8型。IVDP和其他退行性疾病9。良性肥厚前列腺切除术10。子宫切除术/肌瘤切除术是由于肌瘤和/或Mennorhagia11。心脏病12。任何类型的癌/肉瘤/血液癌13。任何关节的骨关节炎14。胃和十二指肠溃疡15。甲状腺切除术,用于结节/多管状甲状腺肿16。Varicocele 17。精子素18.直肠脱垂19。D&C 20。视网膜病的玻璃体切除术和视网膜脱离手术21。由于糖尿病而截肢22。瘘管在ANO 23。ANO中的裂缝24。疝气25。氢密膨胀26。鼻窦炎27。膝盖 /髋关节置换28。< / div>CRF或末期肾衰竭29。白内障30。乳突切除术(可去除耳后骨头的手术)31。鼓膜成形术(修复鼓膜膜的手术又名耳膜)32。未降低的睾丸33。Genito尿路手术34。痛风35。风湿病36。高血压37。DM 38。静脉曲张和静脉曲张溃疡39。痔疮(桩)

印度 Pratham 的态度确定和控制......
本文介绍了由印度理工学院孟买分校学生建造的微型卫星“Pratham”的姿态确定和控制子系统。学生卫星(如 Pratham)通常具有有限的传感、计算和通信能力,因此需要自主且计算效率高的算法。本文介绍了以最小计算负荷和无需任何地面支持即可实现所需指向精度的姿态确定和控制方法。三轴磁力计、六个 2-π 太阳传感器和一个单频 GPS 接收器用作机载传感器,使用单帧方法进行姿态确定。姿态控制器设计为使用三个正交磁力矩器实现 10 度的天底指向精度。通过涉及卫星环境、动力学、执行器和传感器模型的闭环仿真验证了算法的性能。最后,介绍了实时机载计算机在环仿真的初步结果。

电离层总电子数的测量......
Pratham 的社会目标代表了团队的信念:对于学生卫星而言,在卫星技术领域获得的知识是任务目标和任务成功的重要组成部分。正是考虑到这一点,Pratham 决定邀请其他大学参与该项目,为卫星建造地面站。这样做的目的是传播团队在卫星技术领域获得的知识,同时让他们成为任务的一部分。因此,我们开始了一系列地面站研讨会,每个研讨会都侧重于地面站制造和设置的不同领域。随着印度政府人力资源开发部发起的项目虚拟实验室的建立,社会目标又向前迈进了一步。我们将在以下各节中详细描述上述每一项。
人工智能时代的学习与领导
微软 全国州教育委员会协会 国家教育与经济中心 (NCEE) 全国数学教师委员会 全国英语教师委员会 (NCTE) NCWIT 全国教育协会 全国学校董事会协会 全国科学教学协会 一代人——Indigitize OpenAI 培生加州教育政策分析 (PACE) Pratham International RobinCode SETDA Shule Direct SIIA 西班牙信息科学协会 巴西计算机协会 南部地区教育委员会 东南亚教育部长组织 STEAMLabs Africa 全民教育 为美国而教 德克萨斯高级计算中心 联合国儿童基金会 沃顿互动 WIDA WISE 世界银行

RI 23 - ACIO DHARAN.xlsx - 英国陆军
Ser NPP全名区1 122070/2187 PARAS RAI电话2 12-02-77-00833拉曼RAI电话4 12-02-77-01558 MANAHANG RAI电话CH-018 R243-1 017777002 01-78-200-0 78-05840家庭RAI电话12 12-02-78-02332 RIJAN RAI电话13 12-01-78-06103 UPENDRA RAI电话14 12-01-78-0-01-78-0 -01-78-00372 RAI电话77-04425 Alkan RAI电话22 77-01-78-07380 Kul Bahadur来自电话23 122004/437 Husan Rai电话302 Birkha Bahadur Magar电话27 12-01-01-78-06197 UNG电话32 12-01-77-04234 PRATHAM RAI电话33 122070/1733 Ajay Rai电话34 12-01-78-01602 Bishwa Rai电话37 12-01-78-04993
在AI年龄
Microsoft National Association of State Boards of Education National Center on Education and the Economy (NCEE) National Council of Teachers of Mathematics National Council of Teachers of English (NCTE) NCWIT National Education Association National School Boards Association National Science Teaching Association One Generation – Indigitize OpenAI Pearson Policy Analysis for California Education (PACE) Pratham International RobinCode SETDA Shule Direct SIIA Sociedad Científica Informática de España Sociedade Brasileira deComputação南部地区教育委员会东南亚教育部长组织STEAMLABS非洲为美国教授美国教授德克萨斯州高级计算中心沃顿沃顿酒店互动WISE WISE WISE WISE WISE WISE WISE WISE BANK
定量经济学与数据科学中心
Nishant Sharma获得了黑客马拉松的一等奖,以开发和设计印度政府合作部的仪表板。Ritik Kumar在Kavach 2023的内部黑客马拉松中获得了第一个排名,并在Hacker S Hackathon House Hackath hackath hackath hackath of Hacker s Hackathon 2023中获得了第三名。PARTH SURYADHWAJ,HARSH RANJAN,YAAGIK MAURYA和NAVNEET KUMAR在Adrosonic的10t H anniversar y Elevate的Innovatio n fai r t o客户中展示了他们的项目。ir proje ct v.i.s.i.o.n。W作为亚军行业项目的裁定。Shreyas,Chinmay Nandan&Sahil Ritolia在RBI政策挑战赛中排名第一。Shreyas&Yaagik Maurya在由Ranchi NSSO组织的Anwesha测验2022中排名第四。Nishant Sharma被接受为2024年Athabasca Universit Y Edmonton(加拿大)的全资金Mitacs Globalink研究员。Chinmay Nandan,Ashutosh Kumar,Prabhat Kumar&Pratham Shaha在Hack 24 Hackatho n中排名第二,由数据科学协会组织,2024年。Chinmay Nandan&Shreyas获得了107和170的排名,是2024年硕士学位的联合入学测试[Statistics]。ramavat h bhanuprakas h实现了经济学中的k 4。Sudhanshu Kumar获得了252级[统计]和Chinmay Nandan的等级557 [数据科学] I N GATE2024。
+91-11-40759000,电子邮件:jeemain@nta.ac.in 网站/网络
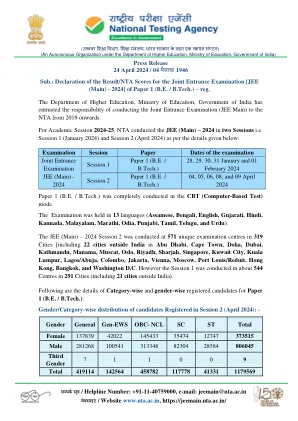
序号申请编号候选名称资格状态12 24031010660 Rohan Sai Pabba Telangana 13 240310850450 Sriyashas Mohan Kalluri Telangana 14 240310618179 Kesam Channa Channa basava basava basava basava basava basava basava basava reddy telangana 15 Iyan Maharashtra 17 240310038821 Shaik Suraj Andhra Pradesh 18 240310166809 Makineni Jishnu Sai Andhra Pradesh 19 240310033821 Rishi卡塔·塔尼(Kata Tanish Reddy Andhra) 22 240310580429 HIMANSHU THALOR RAJASTHAN 23 240310339412 THOTA SAI KARTHIK ANDHRA PRADESH 24 240310889590 TAVVA DINESH REDDY TELANGANA 8 akshat shaplot拉贾斯坦邦28 240310157524 PAREKH METED VIKRAMBHAI GUJARAT 29 240310228186 SHIVANSH NAIR HARYANA 30 240310059925塔尔邦33 240310405487 PRATHAM KUMAR BIHAR 34 240310150036 SANVI JAIN JAIN KARNATAKA 35 240310270352 GANGA SHREYAS TELANGANA 36 240310157063 52 MADHAV BANSAL DELHI 39 240310895915 POLISETTY RITISH BALAJI TELANGANA 40 240310046262 VISHARAD SRIVASTAVA MAHARASHTRA 41 24031036555555 Am Jayadev Reddy Telangana 44 240310874170 Kanani Harshal Bharatbhai Gujarat 45 240310011540 Yashneil Rawat Rawat Rajasthan 46 240310100229 Ishaan Gupta Rajasthan 47 42275 Mavuru Jaswith Telangana 50 240310535954 BHAVESH RAMAKRISHNAN KARTHIK DELHI 51 24031036475 PATIL PRANAV PRANAV MAHARAD MAHARASTRA 52 0310117290 Arsh Gupta Delhi 55 240310059329 N Shriram 泰米尔纳德邦 56 240310152921 Aadeshveer Singh 旁遮普邦
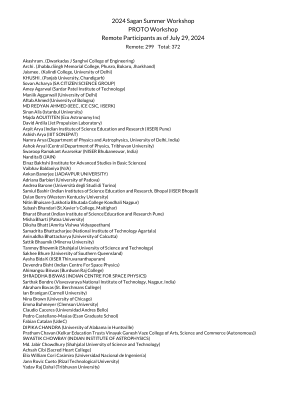
2024 年 Sagan 夏季研讨会 PROTO ...
阿卡什拉姆。 (Dwarkadas J Sanghvi 工程学院)Archi。 (贾坎德邦博卡罗市普斯罗市 Jhabbu Singh 纪念学院) Jaismee (德里大学卡林迪学院) KHUSHI。 (潘贾布大学,昌迪加尔) Pune)Ashish Arya(IIIT SONEPAT)Namra Arya(印度德里大学物理学和天体物理学系) IR(印度科学教育与研究,Bhopal(Iiser Bhopal))Dy Lan Berry(西肯塔基大学)Nitin Bhaisare(Lakhotia Bhutada College Kondhali Nagpur)Subash Bhandari(Maitighar's College,Maitighar's Science bharat bhara BharaT bhaart bhaint dikn dikn dik dik dikn dik bharat bharat bharat bharat bharat bharat bharat bharat bharat bharat bharat bharat bharat bharat bharat bharat dikn (Amrita Vishwa Vidyapeetham)。 Sarthak Bondre(印度那格浦尔的Visvesvaraya国家理工学院)亚伯拉罕·博瓦斯(St.贝尔赫曼斯学院 Ian Branigan(康奈尔大学) Nina Brown(芝加哥大学) Emma Buhmeyer(克莱姆森大学) Claudio Caceres(安德鲁大学) Pedro Castellano-Masias(埃桑研究生院) Fabian Catalan(蒙特利尔大学) Vaze 艺术、科学与商业学院(自治学院) SWASTIK CHOWBAY(印度天体物理研究所) Md. Jabir Chowdhury(沙阿贾拉勒科技大学) Achsah Cibi(圣心学院) Elio William Cori Casimiro(国立工程大学) Jann Rovic Cueto(黎刹科技大学) Yadav Raj Dahal(特里布万大学)