XiaoMi-AI文件搜索系统
World File Search SystemRGB

有用的Doggybot:使用腿部机器人和视觉模型
摘要 - 基于学习的方法已经实现了四足动力的强大性能。然而,一些挑战阻止了四足动物学习需要与环境和人类互动的有用室内技能:缺乏操纵的最终效果,仅使用模拟数据使用有限的语义介绍,以及在室内环境中的较低的遍历性和可及性。我们提出了一个在室内环境中进行四足动物移动操作的系统。它使用前式握把进行对象操纵,这是一种低级控制器,在模拟中培训了以egile的深度进行训练,以攀登和全身倾斜等敏捷技能,以及预先训练的视觉语言模型(VLMS),并具有第三人称Fisheye和Egentric RGB摄像头,以探索fishereye和Egincentric RGB摄像头,以进行儿子理解和指挥生成。我们在两个看不见的环境中评估了我们的系统,而没有任何现实数据收集或培训。我们的系统可以零射对这些环境并完成任务,例如遵循用户的命令在攀登女王大小的床上,成功率为60%。
讲座 (2008) - 防卫省/自卫队
利用 TOF-MS 检测微生物 国际危机管理研讨会 CIS 研讨会组织委员会 2008.9 Naohiro Muronoi Hideyuki Hayashi Shiro Kushima 使用 RGB 值自动识别化学剂的变色反应 国际危机管理研讨会 CIS 研讨会组织委员会 2008.9 Eri Kawashima Hideyuki Yanagibashi串岛四郎

Kubos Semiconductors Ltd 开发副总裁
Kubos Semiconductors Ltd 开发副总裁 – 职位说明 Kubos Semiconductors 正在开发和商业化其立方氮化镓 (GaN) 专利技术,该技术有可能显著提高 LED 的效率,特别是在可见光谱的绿色和琥珀色区域。Kubos 的技术可以在需要 RGB LED 的任何地方提供根本优势,从而实现暖白光或可调 RGB 照明、显示器和高强度灯的全部潜在效率。微型 LED 中的应用可能会对打入主流市场产生变革性影响。Kubos 拥有自己的小团队,但没有晶圆厂,所有开发都在第三方设施(包括学术机构和商业制造设施)进行。我们的技术最初是在剑桥大学开发的,一些关键开发仍在根据合同继续进行。Kubos 的商业计划不是在激烈的 LED 市场上竞争,而是将技术授权给现有的大型 LED 制造商。 Kubos 的立方 GaN LED 堆栈可以直接替代传统基板,为希望利用该技术的产品开发人员降低了进入门槛。开发副总裁总结

礁石水下视频的3D计算机视觉
3D计算机视觉是ECEO的礁石水下视频,我们正在开发一种新方法来监视水下视频的珊瑚礁[2]。 来自跨国红海中心在以色列,约旦和吉布提的探险队的一部分收集的珊瑚礁地点的视频。 使用框架的语义分段对视频进行分析,并使用同时本地化和映射(SLAM)从访问的礁石站点创建3D点云,每个点都具有其RGB颜色及其语义类别(例如,>3D计算机视觉是ECEO的礁石水下视频,我们正在开发一种新方法来监视水下视频的珊瑚礁[2]。来自跨国红海中心在以色列,约旦和吉布提的探险队的一部分收集的珊瑚礁地点的视频。使用框架的语义分段对视频进行分析,并使用同时本地化和映射(SLAM)从访问的礁石站点创建3D点云,每个点都具有其RGB颜色及其语义类别(例如,岩石,沙子,活珊瑚,死珊瑚等)附件。可以收集此类视频的便利性有望通过数量级提高珊瑚礁监测方法的可伸缩性。
![arxiv:2404.06507V2 [CS.CV] 2024年4月10日](/simg/8\887ff3945aa835c753f3eaf566e04ff3f0a6cc4f.webp)
arxiv:2404.06507V2 [CS.CV] 2024年4月10日
用手操纵的对象(即Manipulanda)对于从互联网视频中重建的重建尤其具有挑战性。手不仅会阻塞大部分观察,而且对象通常仅在少数图像像素中可见。同时,在这种情况下出现了两个强大的安装:(1)估计的3D手有助于消除对象的位置和规模,以及(2)相对于所有可能的观察,Manipulanda的集合很小。考虑到这些见解,我们提出了用于手持对象重建的可扩展范式,该范式基于大型语言/视觉模型和3D对象数据集的最新突破。鉴于单眼RGB视频,我们的目标是随着时间的流逝,以3D的形式重建手持对象几何形状。为了获得最佳性能的单帧模型,我们首先提出MCC手对象(McCho),该模型共同重建手和对象地理位置 - 给定单个RGB图像,并将3D手推断为输入。随后,我们使用GPT-4(v)提示文本到3D生成模型,以检索与图像中对象匹配的3D对象模型;我们称此对齐方式检索重建(RAR)。RAR提供
天马,P0840SVN1MB00由数据模块AG
尺寸8.4英寸分辨率800(RGB)x 600像素螺距0.213×0.213毫米TFT活动面积170.4(W)X127.8(H)MM技术A型A-SI SI像素像素配置R.G.B垂直条纹模式TN,通常是白色表面处理模式,通常是白色的表面视图,均为灰色diveriond nirection drifect niressiond of Arock灰色scem <

首先,我们要对匿名审稿人,编辑和编辑支持团队卢卡·莱利(Luca Lelli)表示衷心的感谢
下面概述,我们根据反馈修改了手稿。审阅者的评论在下面复制并在斜体中显示,而我们的回答和手稿中的相应文本分别以红色和橙色显示。对图3、7的编辑支持团队的响应:请确保地图和图表中使用的配色方案允许具有彩色视觉缺陷的读者正确解释您的发现。请使用Coblis - 色盲模拟器(https://www.color-blindness.com/coblis-color-blindness-simulator/)检查您的数字,并在下一个文件上传请求中相应地修改颜色方案。答案:在回答评论时,我们更新了图3和图4(不包括图3a)的配色方案,以在AMT提交页面(https://www.atmospheric-measurement-techniques.net/net/submission.html)上推荐的“科学颜色图”。但是,由于三个通道的值直接分配给R,G和B,因此我们不确定如何修改它们以使它们对色盲友好。相反,我们利用了“ Coblis - 色盲模拟器”来确认图3和7中的RGB图像可以由异常三角形的读者正确解释。
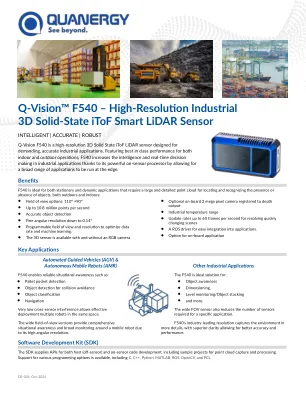
Q-Vision F540-W - 数据表 - 2024 年 10 月
F540 非常适合静态和动态应用,这些应用需要大量详细的点云来定位和识别室内和室外物体的存在与否:• 视野范围:110° ×90° • 每秒高达 1080 万个点 • 精确的物体检测 • 精细的角度分辨率低至 0.14° • 可编程的视野和分辨率,以优化数据速率和机器学习。• 3D 传感器可带或不带 RGB 摄像头使用

带有事件摄像机的低延迟汽车视觉
高级驱动程序辅助系统中当前使用的计算机视觉算法依赖于基于图像的RGB摄像机,从而实现了至关重要的带宽 - latatency折衷,以提供安全的驾驶体验。为了解决这个问题,事件摄像机已成为替代视觉传感器。事件摄像机测量强度不同步的变化,提供了高的时间分辨率和稀疏性,显着降低了带宽和潜伏要求1。尽管有这些优势,但基于事件相机的算法在准确性方面还是高效,但要么落后于基于图像的算法,要么牺牲事件的稀疏性和效率以获得可比的结果。为了克服这一点,我们在这里提出了一个基于混合事件和框架的对象检测器,该对象检测器保留了每种方式的优势,因此并不遭受这种权衡。我们的方法利用了事件的高时间分辨率和稀疏性以及标准图像中富裕但低的时间分辨率信息,以生成有效的高速对象检测,从而减少感知和计算潜伏期。我们表明,使用20帧每秒(FPS)RGB摄像头和事件摄像机的使用可以达到与5,000-FPS摄像机相同的延迟,而具有45-FPS摄像机的带宽而不会损害精度。我们的方法通过发现事件摄像机2的潜力,为在边缘场景中有效和强大的感知铺平了道路。