XiaoMi-AI文件搜索系统
World File Search SystemSamarth

samartha brahmbhatt
指导出版物1。“针对目标投掷的最终效力者的识别和学习控制” - Hasith Venkata Sai Pasala,Nagamanikandan Govindan和Samarth Brahmbhatt,IEEE Robotics and Automation and Automation Fetters,第1卷。9,不。11,pp。9558-9564,2024年11月2。“ Imagine2Servo: Intelligent Visual Servoing with Diffusion-Driven Goal Generation for Robotic Tasks ” - Pranjali Pathre, Gunjan Gupta, M. Nomaan Qureshi, Mandyam Brunda, Samarth Brahmbhatt , and K. Madhava Krishna, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2024 3.“ OpenBot-Fleet:与真实机器人进行集体学习的系统” - MatthiasMéuller,Samarth Brahmbhatt,Ankur Deka,Ankur Deka,Quentin Leboutet,David Hafner和Vladlen Koltun和Vladlen Koltun,国际机器人和自动化(ICRA)2024 4。“偷偷摸摸的人:偷偷摸摸的声学本地化” - 孟尤杨,帕特里克·格雷迪,萨玛斯·布拉姆布哈特,Arun Balajee Vasudevan,Charles C. Kemp,Charles C. Kemp和James Hays,Inter-National-National-National-National-National-National-National-inter-National-inter-National-national-inter-National-national-of Robotics and Automation and Automation(ICRA)20224 5。“基于触觉的对象插入政策的零射击” - 萨玛斯·布拉姆·伯特(Samarth Brahmbhatt),安卡尔·德卡(Ankur Deka),安德鲁·斯皮尔伯格(Andrew Spielberg)和马蒂亚斯·米勒(MatthiasMéuller),国际机器人和自动化会议(ICRA)2023 6。“压力之间:估算单个RGB图像的手压力” - 帕特里克·格雷迪,昌昌唐,萨玛斯·布拉姆·Bhatt,克里斯托弗·D·特里克,陈德·沃恩,詹姆斯·海斯,詹姆斯·海斯和查尔斯·肯普,欧洲计算机视觉会议(ECCV)2022(ORAL)7。“对软机器人抓手的视觉压力估计和控制” - 帕特里克·格雷迪,杰里米·A·柯林斯,萨玛斯·布拉姆·布拉特,克里斯托弗·D·特·特维格,昌昌唐,詹姆斯·海斯和查尔斯·C·坎普,IEEE/RSJ IEEE/RSJ国际智能机器人与系统(IROS)(IROS)2022 8。“联系人:优化联系以提高抓地力” - 帕特里克·格雷迪,郑昌,明·沃,克里斯托弗·D。“联系人:带有物体接触和手动姿势的grasps的数据集” - 萨马斯·布拉姆·汉特(Samarth Brahmbhatt),昌昌唐(Chengcheng Tang),克里斯托弗·D·特克格(Christopher D. Twigg),查尔斯·C·肯普(Charles C.“走向无标记的抓握捕获” -Samarth Brahmbhatt,Charles C. Kemp和James Hays,AR/VR计算机视觉的第三次研讨会,CVPR 2019 11.“ ContactGrasp:来自接触的功能性多手指掌握综合” - Samarth Brahmbhatt,Ankur Handa,James Hays和Dieter Fox,IEEE/RSJ国际智能机器人和系统国际会议(IROS)2019

Samarth S. Raut
项目:基于心脏力学图像的器官尺度建模,基于涉及病例特异性双层几何形状的心脏力学计算模型,纤维架构,使用专门的用户子例程进行材料行为和体内测量的边界条件的专业用户子例程,并通过体内测量的实用测量的功能指示器进行了验证。项目针对i)理解生物力学在心脏生理功能中的作用,尤其是在患病状况下ii)通过虚拟原型制作可以改善医疗器械设计。主要调查员:迈克尔·萨克斯(Michael Sacks)教授,计算工程与科学研究所(ICES),UT-AUSTIN。资金来源 - Medtronic Inc.明尼苏达州明尼阿波利斯,明尼苏达州,圣大卫基金会,德克萨斯州奥斯汀,临床数据来源 - 宾夕法尼亚州费城宾夕法尼亚大学的Gorman Cardiovascular Research Group。
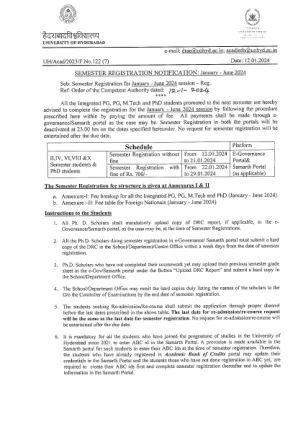
2024 年 6 月)通过电子政务/Samarth 门户
1. 所有宿舍学生(除 SC/ST 学生和 JRF/SRF 持有者外)均应支付 500 卢比的房租。2. 学期登记卡仅在学生升入当前学期(即 2024 年 1 月至 6 月)时有效。3. 兼职学生除规定费用外还需支付 5000 卢比的兼职费用。

手册15(1).pdf
大学发出的所有重要通知和通函都放在大学的公告板上。《 BHU法》,1915年,有关各种事项的法规,法规,规则和法规,可以在印刷和大学网站上提供。可以从大学的出版牢房中获得大学各个课程的教学大纲。PDF表格,BHU法案,法规与条例,BHU教学大纲,年度报告,执行委员会的议程和MOM(S),学生实力类别,重新认证报告,各种(新闻/通知/学术事件)等Information Bulletin (UG/PG/PhD/School), Academics (All Institutes/Faculties/Offices/Centres/Units)), Administration, Students, Amenities, Recruitments, Services (Computer Centre, Central Library, Electric & Water Service Supply, Central Discovery Centre, University Guest House Complex, Lakshman Das Guest House, University Guest House, Faculty Guest House, Shanti Swaroop Bhatnagar Guest House, Sir Sundrlal Hospital &OPD在线和离线服务(https://bhuopd.com/),知识产权和技术传输单元格,电话目录等也可以在BHU在线入学网站(https://www.bhuonline.in)和Bhu Main网站(https://wwwww.bhu.ac.in)上获得,BHU员工可访问login login login login login login login login login login login samarth门户网站(https://bhu.samarth.edu.in/ index.php/site/login),pg录取(组合分配)程序是访问登录到samarth Portal网站(https://bhucuetpg.samarth.samarth.edu.in)bhu招聘端口的登录名https://bhunt.samarth.edu.in/index.php/site/login)。
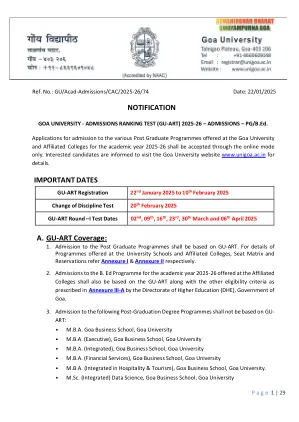
生活世界:什么是生活?生物多样性;需要分类;生命的三个领域;分类学和系统学;物种和分类群的概念InfofestGU/ACAD - PG/BOS -NEP ENGG./2024-25/770日期:22.01。 ... 入学排名测试(GU-ART)2025-26GU/ACAD - PG/BOS -NEP ENGG./2024-25/770日期:22.01。 ...入学排名测试(GU-ART)2025-26
接受分支学院提供的B. ED计划2025-26的B. ED计划也应基于GU-ART,以及其他果阿政府高等教育局(DHE)在附件III-A中规定的其他资格标准。候选人在申请Samarth门户时必须选择学士学位。在附件III-B上指示了与B.Ed有关的查询。入学联系人:高等教育局,果阿政府,SCERT大楼,Alto-Porvorim,Bardez-Goa,
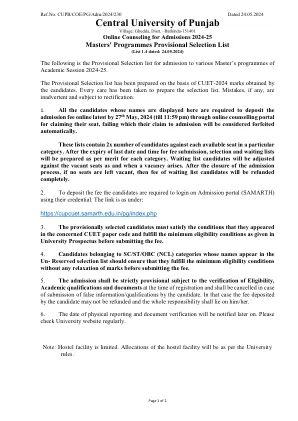
临时选择列表1.4日期为24.05.2024 for ...
这些列表包含针对特定类别中每个可用座位的2倍候选人。在提交费用,选择和等待列表的最后日期和时间之后,将根据每个类别的优点准备。候选人将在空缺时根据空缺席位进行调整。关闭入学过程后,如果没有空缺,则候补名单的费用将被完全退还。2。要存入候选人必须使用其凭据来登录入场门户(Samarth)的费用。链接如下:https://cupcuet.samarth.edu.in/pg/index.php 3。临时选择的候选人必须满足他们在相关的Cuet码中出现的条件,并在提交费用之前履行大学招股说明书中所述的最低资格条件。
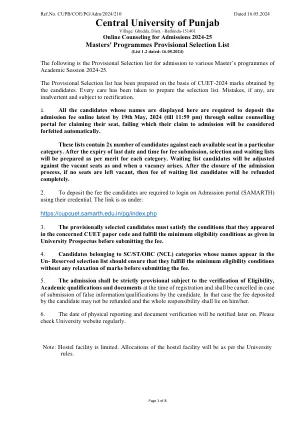
临时选择列表1.2 pg入学-2024-25
这些列表包含针对特定类别中每个可用座位的2倍候选人。在提交费用,选择和等待列表的最后日期和时间之后,将根据每个类别的优点准备。候选人将在空缺时根据空缺席位进行调整。关闭入学过程后,如果没有空缺,则候补名单的费用将被完全退还。2。要存入候选人必须使用其凭据来登录入场门户(Samarth)的费用。链接如下:https://cupcuet.samarth.edu.in/pg/index.php 3。临时选择的候选人必须满足他们在相关的Cuet码中出现的条件,并在提交费用之前履行大学招股说明书中所述的最低资格条件。
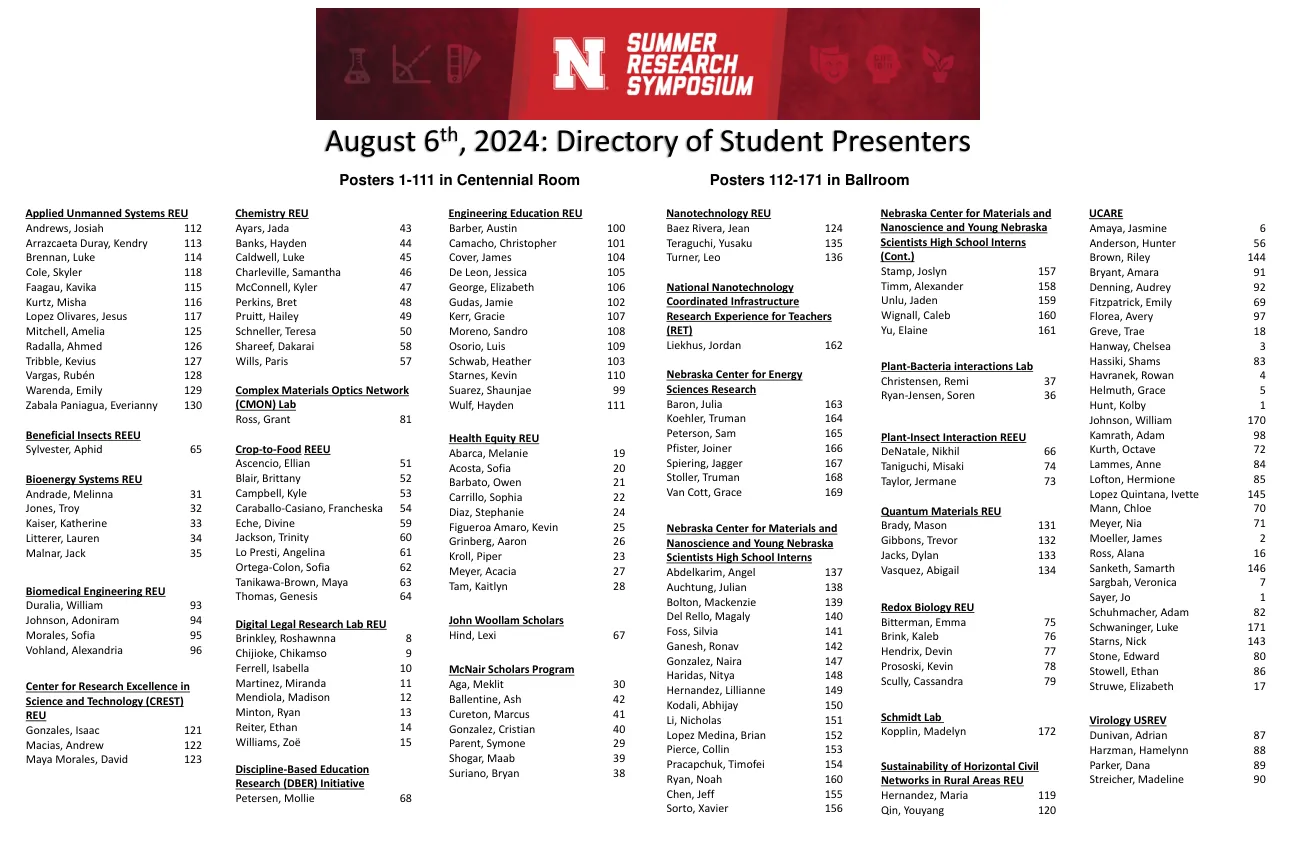
2024年8月6日:学生演示者目录
Amaya, Jasmine 6 Anderson, Hunter 56 Brown, Riley 144 Bryant, Amara 91 Denning, Audrey 92 Fitzpatrick, Emily 69 Florea, Avery 97 Greve, Trae 18 Hanway, Chelsea 3 Hassiki, Shams 83 Havranek, Rowan 4 Helmuth, Grace 5 Hunt, Kolby 1 Johnson, William 170 Kamrath, Adam 98 Kurth, Octave 72 Lammes, Anne 84 Lofton, Hermione 85 Lopez Quintana, Ivette 145 Mann, Chloe 70 Meyer, Nia 71 Moeller, James 2 Ross, Alana 16 Sanketh, Samarth 146 Sargbah, Veronica 7 Sayer, Jo 1 Schuhmacher, Adam 82 Schwaninger, Luke 171 Starns, Nick 143斯通,爱德华80 Stowell,Ethan 86 Struwe,Elizabeth 17

糖尿病:评论
Neha Satish Bhor, Rutuja Dattatraya Vyavhare Samarth College of Pharmacy, Belhe, Maharashtra, India Department of Pharmacology, Samarth College of Pharmacy, Belhe, Maharashtra, India Abstract: Diabetes mellitus (DM), or simply diabetes, is a group of metabolic diseases in which a person has high blood sugar, either because the body does无法产生足够的胰岛素,或者因为细胞对产生的胰岛素没有反应。这种高血糖会产生多尿液(频繁排尿),多次多次(渴望增加)和多形皮(增加饥饿)的经典症状。通常,糖尿病已分为三种类型:1型DM或胰岛素依赖性糖尿病(IDDM),其中人体无法产生胰岛素,目前要求该人注入胰岛素或穿胰岛素泵。这也称为“少年糖尿病”。2型DM或非胰岛素依赖性糖尿病(NIDDM)是由胰岛素抵抗引起的,胰岛素抵抗是细胞无法正确使用胰岛素,有或没有绝对胰岛素缺乏的情况。此类型以前被称为或“成人发作糖尿病”。第三种主要类型是妊娠糖尿病,发生在没有先前的糖尿病史的女性在怀孕期间出现高血糖水平。它可能在2型DM的开发之前。目前可用于治疗糖尿病的药物疗法包括胰岛素和口服降血糖药。这种药物通过增加胰腺中胰岛素的分泌或通过增加葡萄糖摄取和减少糖异生的血浆葡萄糖浓度来起作用。但是,这些目前的药物不会在更长的时间内恢复正常的葡萄糖稳态,并且它们不受副作用,例如低血糖,肾脏疾病,GIT问题,肝毒性,心脏风险问题,胰岛素瘤,胰岛素瘤,并且必须享受余生。由于其在糖尿病治疗中的有益内容,各种草药也已被证明有效。因此,本评论是一种尝试着眼于糖尿病的生理方面,其并发症,管理目标以及糖尿病的合成和草药治疗。关键词:胰岛素瘤,高胰岛素血症,脂联素,Momordica Charantia。
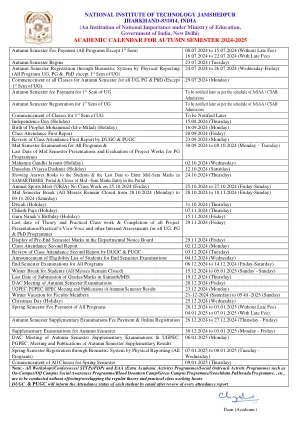
秋季学期的学术日历2024- ...
在部门公告委员会29.11.2024(星期五)上课第二次出勤报告02.12.2024(星期一)审查DUGC&PUGC 03.12.2024(星期二)宣布末期学期考试的资格清单04.12.2024(周三)EndeSter Essmitions for SemeSter Extem for All Evilitiviby的宣布清单的 上课委员会29.11.2024(星期五)上课第二次审查。 14.12.2024(星期五至周日)学生(所有混乱均已关闭)15.12.2024至05.01.2025(周日 - 星期日 - 周日)在萨马斯/MIS中提交成绩/分数的最后日期19.12.2024(星期四)at室学期审查的DAC Ensectation 20.12.2024(星期五)UGPEC,PGPEC,PGPEC,PGPEC,PGPEC,PGPEC,PGPEC,PGPEC,PGPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPP。 23.12.2024(星期一)教师的冬季假期21-12-2024(星期六)至05-01-2025(星期日)圣诞节(假期)25.12.2024(星期三)春季学期费用支付所有课程的费用28.12.2024至03.01.2025(无延迟费用)。付款和在线注册26.12.2024至27.12.2024(星期四 - 星期五)上课委员会29.11.2024(星期五)上课第二次审查。 14.12.2024(星期五至周日)学生(所有混乱均已关闭)15.12.2024至05.01.2025(周日 - 星期日 - 周日)在萨马斯/MIS中提交成绩/分数的最后日期19.12.2024(星期四)at室学期审查的DAC Ensectation 20.12.2024(星期五)UGPEC,PGPEC,PGPEC,PGPEC,PGPEC,PGPEC,PGPEC,PGPEC,PGPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPP。 23.12.2024(星期一)教师的冬季假期21-12-2024(星期六)至05-01-2025(星期日)圣诞节(假期)25.12.2024(星期三)春季学期费用支付所有课程的费用28.12.2024至03.01.2025(无延迟费用)。付款和在线注册26.12.2024至27.12.2024(星期四 - 星期五)上课委员会29.11.2024(星期五)上课第二次审查。 14.12.2024(星期五至周日)学生(所有混乱均已关闭)15.12.2024至05.01.2025(周日 - 星期日 - 周日)在萨马斯/MIS中提交成绩/分数的最后日期19.12.2024(星期四)at室学期审查的DAC Ensectation 20.12.2024(星期五)UGPEC,PGPEC,PGPEC,PGPEC,PGPEC,PGPEC,PGPEC,PGPEC,PGPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPP。 23.12.2024(星期一)教师的冬季假期21-12-2024(星期六)至05-01-2025(星期日)圣诞节(假期)25.12.2024(星期三)春季学期费用支付所有课程的费用28.12.2024至03.01.2025(无延迟费用)。付款和在线注册26.12.2024至27.12.2024(星期四 - 星期五)上课委员会29.11.2024(星期五)上课第二次审查。 14.12.2024(星期五至周日)学生(所有混乱均已关闭)15.12.2024至05.01.2025(周日 - 星期日 - 周日)在萨马斯/MIS中提交成绩/分数的最后日期19.12.2024(星期四)at室学期审查的DAC Ensectation 20.12.2024(星期五)UGPEC,PGPEC,PGPEC,PGPEC,PGPEC,PGPEC,PGPEC,PGPEC,PGPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPP。 23.12.2024(星期一)教师的冬季假期21-12-2024(星期六)至05-01-2025(星期日)圣诞节(假期)25.12.2024(星期三)春季学期费用支付所有课程的费用28.12.2024至03.01.2025(无延迟费用)。付款和在线注册26.12.2024至27.12.2024(星期四 - 星期五)上课委员会29.11.2024(星期五)上课第二次审查。 14.12.2024(星期五至周日)学生(所有混乱均已关闭)15.12.2024至05.01.2025(周日 - 星期日 - 周日)在萨马斯/MIS中提交成绩/分数的最后日期19.12.2024(星期四)at室学期审查的DAC Ensectation 20.12.2024(星期五)UGPEC,PGPEC,PGPEC,PGPEC,PGPEC,PGPEC,PGPEC,PGPEC,PGPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPP。 23.12.2024(星期一)教师的冬季假期21-12-2024(星期六)至05-01-2025(星期日)圣诞节(假期)25.12.2024(星期三)春季学期费用支付所有课程的费用28.12.2024至03.01.2025(无延迟费用)。付款和在线注册26.12.2024至27.12.2024(星期四 - 星期五)上课委员会29.11.2024(星期五)上课第二次审查。 14.12.2024(星期五至周日)学生(所有混乱均已关闭)15.12.2024至05.01.2025(周日 - 星期日 - 周日)在萨马斯/MIS中提交成绩/分数的最后日期19.12.2024(星期四)at室学期审查的DAC Ensectation 20.12.2024(星期五)UGPEC,PGPEC,PGPEC,PGPEC,PGPEC,PGPEC,PGPEC,PGPEC,PGPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPP。 23.12.2024(星期一)教师的冬季假期21-12-2024(星期六)至05-01-2025(星期日)圣诞节(假期)25.12.2024(星期三)春季学期费用支付所有课程的费用28.12.2024至03.01.2025(无延迟费用)。付款和在线注册26.12.2024至27.12.2024(星期四 - 星期五)