XiaoMi-AI文件搜索系统
World File Search SystemWaypoints
Primus Apex 为 Viking Air 的 Twin Otter 提供 - 霍尼韦尔航空航天
飞行管理系统 • 第 2A 阶段引入了双 FMS 安装选项,无需任何额外硬件,支持 – 综合导航数据库 – 图形 INAV 和飞行计划 – 主要和次要飞行计划 - 每个飞行计划 100 个航路点 - 1000 个存储的飞行员定义航路点 - 3000 个存储的飞行计划 – 精密和非精密进近 – SID/STAR 程序 – 广域增强系统 (WAAS) – 全套 RNAV 进近 - RNP - LNAV/VNAV - LNAV - LPV - 大角度进近和着陆 – 垂直下滑道 (VGP) 模式 – 垂直导航 (VNAV) – 直达功能 – 自动航段转换 – 自动倾斜角限制 – 平行偏移 – 天气备用 – 大容量存储模块 – PC 飞行计划工具

红男爵拦截系统® RBIS®
RED BARON INTERCEPTOR® 的解决方案 RBIS® 拦截器使用 AI 来实施经过验证的空中作战战术,例如无人驾驶的空中缠斗战术,以杀死接近的威胁并充当普通导弹。RBIS® 的移动发射器分配拦截器并预测航路点以引导拦截器,同时连接到通信中心。

四轮手机的纯追求控制器策略...
在本文中使用了纯追求算法(PPA)来解释四个轮子的汽车如何移动。MATLAB环境具有广泛的模拟功能,可以准确地代表复杂的机器人行为。是这些部署的是对机器人操作动力学的扩展分析。在MATLAB/SIMULINK框架中,从不同算法获得的航路点定义了机器人轨迹。一个里程表传感器有助于本地化机器人,从而在其位置上提供了准确的实时信息。在批判性地评估了几个性能指数之后,很清楚该控制算法的工作状况如何,因为它将机器人从初始状态顺利移动到其目标,几乎完全没有振荡。模拟的发现确认,如果选择了适当的lookahead距离,那么机器人可以有效地跟踪航路点并沿着轨迹保持最佳路径,直到终于到达目标点

高速公路:使用RL信息模型
摘要 - 自主驾驶是一项复杂的任务,需要高级决策和控制算法。了解自动驾驶汽车决定背后的基本原理对于确保其在高速公路驾驶中安全有效的操作至关重要。这项研究提出了一种新颖的方法,即Highwayllm,它利用了大语言模型(LLMS)的推理能力,以预测Ego-Vehicle导航的未来路点。我们的方法还利用预先训练的强化学习(RL)模型作为高级计划者,对适当的元级行动做出决定。Highwayllm结合了RL模型的输出和当前状态信息,以对下一个状态进行安全,无碰撞和可解释的预测,从而为自我车辆构建轨迹。随后,基于PID的控制器将车辆引导到LLM代理预测的航路点。LLM与RL和PID的集成增强了决策过程,并为高速公路自动驾驶提供了解释性。

Wenhao Yang
▶2019年8月至2020年11月增强基于现实的人类机器人交互系统,启动了一个直观的AR系统框架,并在复杂环境中开发了一种基于沉浸式AR的界面(AUBO I5)编程。用户重复Waypoints定义和编辑,碰撞检查以及路径可行性验证的过程,以在建议的系统中获得令人满意的路径。▶2018年8月至5月的复杂模型机器人抛光的数学建模。2019年起草了一个用于机器人抛光的数学模型和轨迹生成方法的建议。通过运动模拟对所提出的方法进行了严格评估,该方法证实了其在产生最佳抛光轨迹方面的有效性。

X650 行业应用四旋翼无人机
智能模式 无人机支持多种智能模式,操作便捷,包括航线飞行、航点飞行、绕圈飞行(兴趣点)、方向锁定模式。无人机可自动起飞并启用智能模式,按照预设的航线/航点和兴趣点飞行。任务完成后,无人机将自动返回基地并降落。
X650 一款适用于行业应用的四旋翼无人机
智能模式 无人机支持多种智能模式,操作便捷,包括航线飞行、航点飞行、环线(兴趣点)、方向锁定模式。无人机可自动起飞并启用智能模式,按照预设的航线/航点和兴趣点飞行。任务完成后,无人机将自动返回基地并降落。

CheetahNav - Etion Limited
CheetahNAV 采用实时移动地图技术,为驾驶员和机组人员持续提供准确的态势感知信息。CheetahNAV 具有用户友好的图形导航功能,结合惯性、GPS 和指南针信息,可在预设航路点之间准确导航至最终目的地。集成的惯性测量单元 (IMU) 可确保无干扰操作,多语言选项可确保跨国联合行动取得成功。
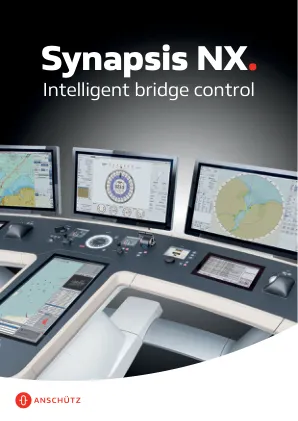
Synapsis NX-智能桥梁控制
ECDIS NX是一种现代的,用户定义的电子图表显示和信息系统(ECDIS),可有效支持导航器的日常任务和用例。广泛的标准功能和选项包括单个可伸缩面板,以最大程度地提高图表的视图,快速访问基本功能,智能和向导指导的工具,用于路线规划,ETA计算以及单个航路点,雷达视频叠加,GEO对象事件的各个航路点的进步速度以及更多。