XiaoMi-AI文件搜索系统
World File Search SystemYAW
探索新兴仪器的承载潜力...
– 主动偏航控制:95% 误差为 7 度,超过所有 5 分钟时间窗口的 95%。 – 被动俯仰和滚转控制,典型误差为 +/- 2 度。 – 滚转、俯仰和偏航角度由姿态传感器测量,精度为 +/- 0.5 度。

专利期刊专利局官方期刊
(57) 摘要:公开了一种用于自主导航的飞行器偏航角估计的系统和方法。该系统包括以预定义方式位于竞技场中的第一组超宽带 (UWB) 传感器,以及安装到飞行器上的第二组超宽带 (UWB) 传感器、加速度计、陀螺仪和处理器。处理器被配置为基于从第一组 UWB 传感器、加速度计和陀螺仪接收的信号来识别第二组 UWB 传感器相对于惯性参考系的位置。处理器还被配置为基于第二组超宽带传感器对应于参考系的矢量角的位置来计算偏航角。该系统始终提供准确的偏航角估计,并且在 GNSS 拒绝环境中提供准确的定位。
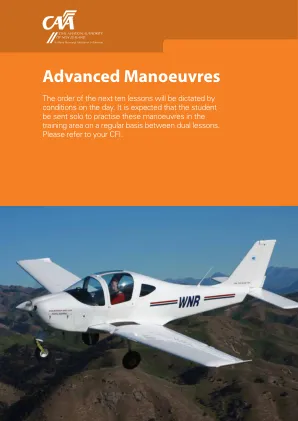
高级机动 | PathFinder Aviation
修改逆偏航及其应对方法。克服逆偏航所需的方向舵量取决于滚转率。通过鼓励平稳的控制输入,将所需的方向舵量保持在最低限度。在低空速时,副翼需要进一步偏转才能达到与较高空速相同的滚转率。这将显著增加诱导阻力,并需要更多的方向舵来抵消逆偏航。这将在滑翔转弯时变得明显。

基于LIDAR定向子图像的自动驾驶图之间的航向点传输模块
摘要:车道图对于描述道路语义和使用本地化和路径规划模块实现安全的操作非常重要。这些图被认为是长寿细节,因为道路结构中发生了罕见的变化。另一方面,由于有必要使用不同的定位系统(例如GNSS/INS-RTK(GIR),Dead-Reckoning(DR)或SLAM Technologies)更新或扩展地图,因此可能会更改相应拓扑图的全局位置。因此,应将车道图准确地在地图之间传输,以描述车道和地标的相同语义。考虑到其在关键的道路结构中实施的挑战性要求,本文根据LiDAR强度路面在图像域中提出了一个独特的转移框架。目标图中的道路表面被分解为全球坐标系中的X,Y和YAW ID的定向子图像。XY ID用于使用参考图检测公共区域,而YAW ID则用于重建参考图中的车辆轨迹并确定相关的车道图。然后将方向子图像匹配到参考子图像,并将图形安全地传输。实验结果已经验证了所提出的框架在地图之间安全,准确地传输巷道图的鲁棒性和可靠性,无论道路结构的复杂性,驾驶场景,地图生成方法和地图全局精度的复杂性如何。


Bowen Nie、Zhitao Liu、Fei Cen、Duoneng Liu、Hongxu Ma 等。一种用于无尾飞机横向飞行品质调查的创新实验方法。IEEE Access,2020 年,第 8 期,第 109543-109556 页。�10.1109/ACCESS.2020.3001913�。�hal-02917902�
摘要 无尾飞机固有偏航控制功率有限和方向稳定性差的缺点。为了在低成本和低风险的无尾配置早期设计过程中解决这些问题,本文提出了一种创新的实验方法,将动态缩放模型安装在风洞中的三自由度装置上,以验证控制律并定量评估飞行品质。推导了无尾演示器在装置上的运动方程,然后对装置约束模型和自由飞行模型的横向飞行动力学进行了比较。根据缩放修正的飞行品质标准,完成了偏航和滚转运动控制增强系统的构建。通过在不同空速和攻角下的稳定飞行员在环飞行证明了所设计的控制律的有效性。通过应用多步机动进行低阶等效系统辨识来评估所实现的闭环飞行品质。尽管在开环情况下偏航会表现出严重的不稳定性,但在低攻角下,荷兰滚模式的闭环飞行品质可以提高到 1 级。
无尾飞机横向飞行品质调查的创新实验方法
摘要 无尾飞机固有的偏航控制功率有限和方向稳定性差的缺点。为了在低成本和低风险的无尾配置早期设计过程中解决这些问题,本文提出了一种创新的实验方法来验证控制律并定量评估飞行品质,该方法使用安装在风洞中三自由度试验台上的动态缩放模型。推导了试验台上无尾演示器的运动方程,然后对试验台约束模型和自由飞行模型之间的横向飞行动力学进行了比较。根据缩放修正的飞行品质标准,完成了偏航和滚转运动控制增强系统的构建。通过在不同空速和攻角下的稳定飞行员在环飞行证明了所设计的控制律的有效性。通过应用多步机动进行低阶等效系统辨识来评估所实现的闭环飞行品质。尽管在开环情况下偏航会表现出严重的不稳定性,但荷兰滚模式的闭环飞行品质在低攻角下可以提高到 1 级。
为医疗补给任务的固定翼无人机设计滑模控制器
图 3.29:升降舵偏转信号 ...................................................................................................... 37 图 3.30:方向舵偏转信号 ...................................................................................................... 37 图 3.31:沿 X 方向的速度 B(“u”) ............................................................................................. 38 图 3.32:沿 Y 方向的速度 B(“v”) ............................................................................................. 38 图 3.33:沿 Z 方向的速度 B(“w”) ............................................................................................. 38 图 3.34:滚转速率(“p”) ............................................................................................................. 39 图 3.35:俯仰速率(“q”) ............................................................................................................. 39 图 3.36:偏航速率(“r”) ............................................................................................................. 39 图 3.37:滚转角度(“Phi”) ............................................................................................................. 40 图 3.38:俯仰角度(“Theta”) ........................................................................................... 40 图 3.39:偏航角(“Psi”)................................................................................................... 40 图 3.40:迎角