XiaoMi-AI文件搜索系统
World File Search Systemcornering

研究汽车稳态转弯平衡和漂移
本文提出了对汽车的稳态转弯平衡的彻底研究。除了对正常驾驶行为做出反应的平衡 - 以下称为稳定的正常转弯外,漂流还吸引了增加的注意力。讨论漂流时,通常假定偏航率和转向角度相反,即驾驶员是反向行驶的,后桥被安装。有趣的是,另一个不稳定的平衡是可观的,此处称为不稳定的正常转弯。在这项工作中,尝试对漂移进行全面定义。提出了一个逆模型来计算以给定半径和侧滑角度执行稳态转弯所需的驱动器输入。通过线性化系统并分析所得状态矩阵的特征值和特征向量来探索所有平衡的数学含义。

课程中的气候教育
Tremaine Baker,米德尔塞克斯大学斯蒂芬·巴伯(Stephen Barber),永久途径机构Clive Belgeonne,Decsy(南约克郡开发教育中心),Liz Bentley教授Liz Bentley,皇家气象学会教授Lynne Bianchi教授,Seerih,Seerih,Seerih,曼彻斯特大学Drece Bunn fimech Unifitiatent of Migin of Colin collin Colin cornering Colin cornering Colin cormern cornering fimmem cornight in Colin colin cormmeg Andrew Crudgington,Ciht Kirsty Dabbs,Reading International团结中心(RISC)Hannah Fitzpatrick,学生组织可持续性(SOS-OK)Adam Flint,让英国保持英国 /生态学校,Stephen Frampton MBE,SS4FE教育教育教授Tat-Hean Gan,tat-Hean Gan,CATETUTE INLLAT STALUTE INLLAT STALUTE GRAITY GRAYE GRAERY GRAERAY GRAERAY GRAERAINE GUERARE GUEREY GUEREY GUEREY GUEUY, CIHT亨利·格林伍德(CIHT Henry Greenwood),绿色学校项目珍妮·格里菲斯(Jenny Griffiths),奥尔顿气候行动网络JO HARRIS,现场研究委员会Giles Hartill Fimeche,机械工程师艾玛·琼斯(Emma Jones)机构艾玛·琼斯(Emma Jones),年轻ACAN(奥尔顿气候行动网络)

山地自行车 - 运动策略。 NCEA PE成就标准1.1
其他骑手通过调整速度/速度成功谈判地形来期待和回应其他骑手。环境条件可以通过调整速度/速度/技术/车身定位来成功协商地形,对环境条件(湿/滑/干/尘土)进行预期和响应。转弯预期并响应地形条件,通过调整速度/速度在成功导航角时进行调整。喜欢通过调整步伐/速度来成功导航随后的角落,链接预期和响应地形条件时,通过使用制动器来调整速度以顺畅地导航后续功能时,可以通过调整速度/速度来成功浏览随后的角度,从而对地形进行响应。加速

推力 6 – NG-NRMM 验证和确认
• 转向性能,包括符合 AVTP 03-30 的墙到墙 (WTW) 转弯半径、符合 SAE J266 和 SAE J2181 的稳态转弯 (SSC) 以及基于 AVTP 03-160W 的双车道变换 (DLC)(铺装路面和非铺装路面)
新Leon
• WINDSTORM 18" Machined wheels in sport black & silver • Heat-insulating and tinted rear windows • Front and rear power windows • Black roof rails • Front Full LEDs • Rear 3D LED lights w/dynamic turn signal & illuminated CUPRA Logo • Dynamic headlight range control self-adjusting while driving • Front LED fog lamps with cornering function • Welcome light in exterior mirrors • Exterior mirrors, power-folding, adjustable and heated带有前乘客外镜降低功能•单独的白天跑步灯/带自动大灯控制和离开家居功能•库库斯运动悬架
新Leon
• WINDSTORM 18" Machined wheels in sport black & silver • Heat-insulating and tinted rear windows • Front and rear power windows • Black roof rails • Front Full LEDs • Rear 3D LED lights w/dynamic turn signal & illuminated CUPRA Logo • Dynamic headlight range control self-adjusting while driving • Front LED fog lamps with cornering function • Welcome light in exterior mirrors • Exterior mirrors, power-folding, adjustable and heated带有前乘客外镜降低功能•单独的白天跑步灯/带自动大灯控制和离开家居功能•库库斯运动悬架
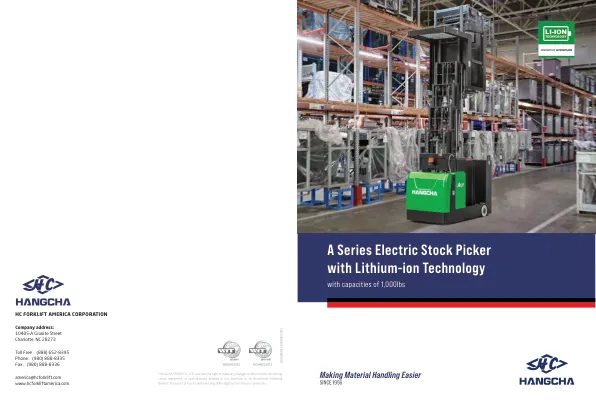
采用锂离子技术的系列电动选股机
低桅杆为操作员提供了完美的视野。控制器限制了选料机转弯时的速度,以确保操作平稳安全。安全踏板包括一个传感器,以确保操作员的脚正确放置在平台上。如果操作员的脚没有放在踏板上,它会自动停止行驶、升降和降低功能。液压系统有一个紧急手动下降阀,可以从选料机的后部操作以降低平台。

建议更改MCAS PPA空白01/22/2025
a。远程信息处理和基于用法的数据 - 通过安装在车辆中的设备,移动应用程序或其他方法收集的数据。这些设备然后将数据实时回传输给保险公司。通过远程信息处理收集的基于用法的数据的示例包括 - 但不限于 - 驱动器,一天中的时间,车辆驱动的时间(全球定位系统或GPS),快速加速,硬制动,硬转弯和气囊部署。2。该公司是否提供专门针对共享服务的产品/认可?
ARD 社区链接通讯 - 2022 年 4 月
指挥部和设施中性骚扰率高与性侵犯率高密切相关。减少您所在单位的性骚扰很可能会降低您所在单位的性侵犯率。如果我们想要预防,那么预防从您开始 - 与我们一起。当发生性骚扰时 - 同事或战友开不恰当的玩笑、含沙射影、嘘声、发送未经请求的短信或图片、身体上逼迫或阻挡他人、欺凌、欺辱、进行交换等 - 我们必须注意这种行为,承认这是一个问题,并制定干预计划。如果您意识到自己有这些行为,您必须停止,因为您正在伤害您的队友和您的单位。每个士兵都应该能够信任他们的领导和战友。
MARK ORTIZ CHASSIS 新闻通讯 - Zonagravedad
2000.5 – 后防倾杆;车轮和车轴偏移的影响;使操纵更一致;齿轮比和 RPM 的关系 2000.6 – 后弹簧分割的影响;使用制动浮子 2000.7 – 后期车型在路面上的刹车失灵;极惯性矩(偏航惯性) 2000.8 – 冲击动力学 – 冲击测功机能告诉您和不能告诉您什么;气压的影响;控制比;固有频率、阻尼强度和抓地力 2000.9 – 如何为四轮定位对汽车进行拉线;主销后倾角的影响 2000.10 – 检查后轴的直线度;扭矩臂与拉杆 2000.11 – 建议的淡季阅读材料 2000.12 – 弹簧、滚动和转弯平衡;短潘哈德杆与长潘哈德杆 2001.1 – 短道车的风洞测试;后脚轮;堆叠式螺旋弹簧 2001.2 – 所需框架刚度;制作压载物 2001.3 – 安全问题 – HANS 装置;软壁设计要求 2001.4 – 第 5 个线圈的位置和速率;软壁更新;汽车上的软鼻子 2001.5 – 普通汽车中的铬钼;后交错与交叉