XiaoMi-AI文件搜索系统
World File Search Systemefficiently
SARS -COV -2尖峰mRNA疫苗序列在19次疫苗接种后长达28天,在血液中循环
严重的急性呼吸道综合征II型(SARS-COV-2)变体的出现导致了现有疫苗和抗体的保护下降,并且迫切需要采取广谱疫苗接种策略,以减少对预防和控制PANDECOGIC的压力。在这项研究中,SARS-COV-2β变体的受体结合结构域(RBD)通过糖化酵母平台成功表达。要采用更广泛的疫苗接种策略,以1:1的比例与Al(OH)3和CpG双佐剂混合了RBD-Beta和RBD-wild类型,用于对BALB/C小鼠进行免疫。这种二价疫苗刺激了强大的共轭抗体滴度和更广泛的中和抗体滴度。这些结果表明,RBD-BETA和RBD-WILD类型的二价疫苗可能是可能的广谱疫苗接种策略。
虚拟试验:从观察性癌症登记处有效学习因果验证的治疗效果
。CC-BY-ND 4.0 国际许可 它是根据作者/资助者提供的,他已授予 medRxiv 永久展示预印本的许可。(未经同行评审认证)

交替分层变分量子电路可以利用经典阴影进行有效的经典优化
变分量子算法 (VQA) 是经典神经网络 (NN) 的量子模拟。VQA 由参数化量子电路 (PQC) 组成,该电路由多层假设(更简单的 PQC,与 NN 层类似)组成,这些假设仅在参数选择上有所不同。先前的研究已将交替分层假设确定为近期量子计算中潜在的新标准假设。事实上,浅层交替分层 VQA 易于实现,并且已被证明既可训练又富有表现力。在这项工作中,我们引入了一种训练算法,可指数级降低此类 VQA 的训练成本。此外,我们的算法使用量子输入数据的经典阴影,因此可以在具有严格性能保证的经典计算机上运行。我们证明了使用我们的算法在寻找状态准备电路和量子自动编码器的示例问题中将训练成本提高了 2-3 个数量级。

腺嘌呤碱基编辑有效恢复范康尼贫血造血干细胞和祖细胞的功能
范可尼贫血 (FA) 是一种使人衰弱的遗传性疾病,具有多种严重症状,包括骨髓衰竭和癌症易感性。CRISPR-Cas 基因组编辑通过利用 DNA 修复来操纵基因型,并已被提议作为 FA 的潜在治疗方法。但 FA 是由 DNA 修复本身的缺陷引起的,从而阻止使用同源定向修复等编辑策略。最近开发的碱基编辑 (BE) 系统不依赖于双链 DNA 断裂,可能用于靶向 FA 基因中的突变,但这仍有待测试。在这里,我们开发了一种概念验证治疗性碱基编辑策略,以解决患者造血干细胞和祖细胞中最常见的两种 FANCA 突变。我们发现,优化腺嘌呤碱基编辑器构建体、载体类型、向导 RNA 格式和递送条件可在多种 FA 患者背景中产生非常有效的基因修饰。优化的碱基编辑恢复了 FANCA 表达、FA 通路的分子功能以及对交联剂的表型抗性。ABE8e 介导的编辑在 FA 患者的原代造血干细胞和祖细胞中既具有基因型有效性,又恢复了 FA 通路功能,表明碱基编辑策略在未来 FA 临床应用中具有潜力。
虚拟试验:有效验证的治疗效应有效地从观察性脑癌注册中学到
。cc-by-nd 4.0国际许可证是根据作者/资助者提供的,他已授予Medrxiv的许可证,以永久显示预印本。(未通过同行评审认证)
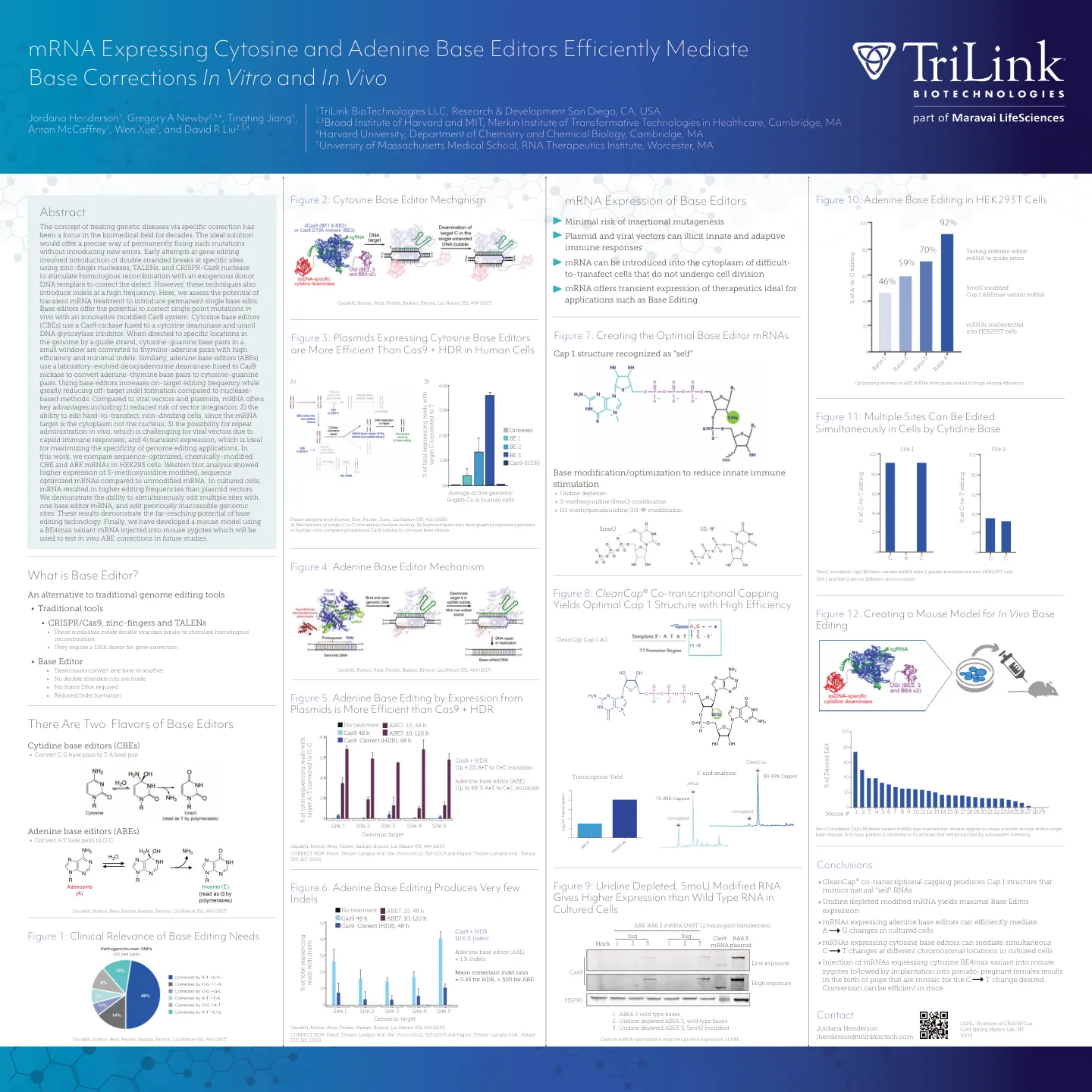
表达胞嘧啶和腺嘌呤碱基编辑器的 mRNA 可有效介导体内和体外碱基校正
通过特异性校正治疗遗传病的概念几十年来一直是生物医学领域的焦点。理想的解决方案是提供一种精确的方法来永久修复此类突变而不会引入新的错误。早期的基因编辑尝试涉及使用锌指核酸酶、TALEN 和 CRISPR-Cas9 核酸酶在特定位点引入双链断裂,以刺激与外源供体 DNA 模板的同源重组以纠正缺陷。然而,这些技术也会以高频率引入插入/缺失。在这里,我们评估了瞬时 mRNA 治疗引入永久性单碱基编辑的潜力。碱基编辑器通过创新的改良 Cas9 系统提供了在体内纠正单点突变的潜力。胞嘧啶碱基编辑器 (CBE) 使用与胞嘧啶脱氨酶和尿嘧啶 DNA 糖基化酶抑制剂融合的 Cas9 切口酶。当引导链将胞嘧啶-鸟嘌呤碱基对导向基因组中的特定位置时,小窗口中的胞嘧啶-鸟嘌呤碱基对会高效地转化为胸腺嘧啶-腺嘌呤对,且插入/缺失最少。同样,腺嘌呤碱基编辑器 (ABE) 使用实验室进化的与 Cas9 切口酶融合的脱氧腺苷脱氨酶将腺嘌呤-胸腺嘧啶碱基对转化为胞嘧啶-鸟嘌呤对。与基于核酸酶的方法相比,使用碱基编辑器可增加靶向编辑频率,同时大大减少脱靶插入/缺失的形成。与病毒载体和质粒相比,mRNA 具有以下主要优势:1) 降低载体整合风险;2) 能够编辑难以转染的非分裂细胞,因为 mRNA 靶标是细胞质而不是细胞核;3) 可在体内重复给药,这对于病毒载体来说具有挑战性,因为衣壳存在免疫反应;4) 瞬时表达,这对于最大限度提高基因组编辑应用的特异性非常理想。在这项研究中,我们比较了 HEK293 细胞中经过序列优化、化学修饰的 CBE 和 ABE mRNA。Western blot 分析显示,与未修饰的 mRNA 相比,经过 5-甲氧基尿苷修饰、经过序列优化的 mRNA 表达更高。在培养细胞中,mRNA 的编辑频率高于质粒载体。我们展示了使用一个碱基编辑器 mRNA 同时编辑多个位点以及编辑以前无法访问的基因组位点的能力。这些结果证明了碱基编辑技术的深远潜力。最后,我们开发了一种小鼠模型,使用注射到小鼠受精卵中的 BE4max 变体 mRNA,该模型将用于在未来的研究中测试体内 ABE 校正。

使用拓扑感知的非结构化环境中的移动机器人导航有效自适应状态晶格*
摘要 - 当代移动机器人导航架构采用计划算法提供单个最佳遵循路径的构建,在有动态和不确定的环境的情况下存在缺陷。随着环境的更新和机器人的起始状态发生变化,最佳计划通常会围绕离散障碍物进行,这对于遵循强烈有偏见的路径遵循计划的路线而言,这是有问题的。在本文中,我们重新制定了有效自适应状态晶格(EASL)所采用的搜索过程,以利用从观察到的环境中提取的同质类别。这种方法,我们称之为拓扑感知有效自适应状态晶格(TAEASL),使用多个数据结构来控制图中节点的扩展,以在图中提供多个最小成本计划,以在不同的同型类别中提供多个最小成本计划。受到任何时间修复a*的方法的启发,搜索继续进行,直到无法进行进一步的扩展或达到最大搜索时间为止。为了验证Taeasl在现场机器人技术中的效用,它在现实世界中的越野环境数据上进行了测试,该数据由Clearpath Warthog无人接地车辆(UGV)收集,并能够生成多个解决方案。本文以讨论包括高速越野移动机器人导航在混乱的障碍物场中的讨论结束。

Prime 编辑可有效在玉米的两个 ALS 基因中产生 W542L 和 S621I 双突变
。CC-BY-NC-ND 4.0 国际许可,根据 提供(未经同行评审认证)是作者/资助者,他已授予 bioRxiv 永久展示预印本的许可。它是此预印本的版权持有者此版本于 2020 年 8 月 20 日发布。;https://doi.org/10.1101/2020.07.06.188896 doi:bioRxiv 预印本
如何通过招标过程有效地为混合能源系统采购电池储能系统
IEC62933-2-1:2017-电源存储(EES)系统 - 第2-1部分:单位参数和测试方法 - 一般规格,2017年。 Epri,“ ESIC - 能源储能综合委员会”,https://www.epri.com/pages/pages/sa/epri-energ-storage-integration-council-council-esic?lang = en-usIEC62933-2-1:2017-电源存储(EES)系统 - 第2-1部分:单位参数和测试方法 - 一般规格,2017年。Epri,“ ESIC - 能源储能综合委员会”,https://www.epri.com/pages/pages/sa/epri-energ-storage-integration-council-council-esic?lang = en-us

如何高效训练你的人工智能代理?在异构平台上表征和评估深度强化学习
摘要 — 深度强化学习 (Dee p RL) 是自动驾驶汽车、机器人、监控等多个领域的一项关键技术。在深度强化学习中,使用深度神经网络或 KMO 德尔、ANA温柔地学习如何与环境互动以实现特定目标。深度强化学习算法架构的运行效率取决于若干因素,包括:( 1) 硬件架构对深度强化学习的基础内核和计算模式的适应性;( 2) 硬件架构的内存分层在通信层面的最小化能力; (3)硬件架构能够通过深度嵌套的高度不规则计算特性来隐藏深度强化学习算法中的开销引入。GP Us 一直是加速强化学习算法的流行方法,然而它们并不能最好地满足上述要求。最近的一些工作已经为特定的深度强化学习算法开发了高可定制加速器。然而,它们不能推广到所有可用的深度强化学习算法和 DNN 模型选择。在本文中,我们探索了开发现场框架的可能性,该框架可以加速各种深度强化学习算法,包括训练方法或 DNN 模型结构的变量。我们通过定义一个领域内特定的高级抽象或一类广泛使用的深度强化学习算法——基于策略的深度强化学习 (on-policy Deep R L) 来实现这个目标。此外,我们还对 CP U-GPU 和 CP U-FPGA 平台上最先进的基于策略的深度强化学习 (on-policy Deep R L) 算法的性能进行了系统分析。我们针对机器人和游戏这两个应用领域选择了两个代表性算法——PPO 和 A 2 C。我们展示了基于 FPG 的定制加速器,它们分别实现了高达 2.4 倍(PPO)和 8 倍(A 2 C)的训练速度提升,以及 1.7 倍(PPO)和 2.1 倍(A 2 C)的整体吞吐量提升。索引术语——强化学习、FPGA