XiaoMi-AI文件搜索系统
World File Search Systemepipolar
使用平行投影对空间线性阵列扫描仪场景进行极线重采样
摘要 对极重采样旨在生成共轭点位于同一行的归一化图像。这一特性使得归一化影像对于自动影像匹配、空中三角测量、DEM 和正射影像生成以及立体观看等许多应用都十分重要。传统上,归一化过程的输入媒体是帧相机捕获的数字影像。这些影像可以通过扫描模拟照片获得,也可以直接由数码相机捕获。与模拟相机相比,当前的数码帧相机提供的图像格式更小。在这方面,线阵扫描仪正在成为二维数码帧相机的可行替代品。然而,线阵扫描仪的成像几何比帧相机更复杂。一般而言,线阵扫描仪的成像几何会产生非直线的对极线。此外,根据忠实描述成像过程的严格模型对捕获的场景进行对极重采样需要了解内部和外部传感器特性以及物体空间的数字高程模型 (DEM)。最近,平行投影已成为一种替代模型,用于近似具有窄视场角的高空扫描仪的成像几何。与严格模型相比,平行投影模型不需要

鸟类眼睛视图语义分割
对环绕声的语义的空间理解是自动驾驶汽车需要安全驾驶决策所需的关键能力。最近,纯粹基于视觉的解决方案已增强了研究的兴趣。在特定的方法中,从多个摄像机中提取鸟类视图(BEV)的方法表现出了很好的空间理解性能。本文介绍了学习的位置编码的依赖性,以将基于变压器的甲基化的图像和BEV特征映射元素关联。我们提出利用外两极的几何约束,以模拟相机注意场与BEV之间的关系。它们被纳入注意机制中,作为一种新的归因术语,是学习位置编码的替代方案。实验表明,与隐式学习摄像机配置相比,我们的方法的大鹰队以2%MIOU的方式优于2%MIOU的BEV方法,并且具有出色的概括能力。
双眼立体>的SGM算法介绍
•对两个图像中的相应像素的搜索如果进行了校准,则两个图像的搜索变得容易一些 - 这意味着,如果两个图像中的同一行中存在一对相应的像素。您从我的讲座24中知道,对于任何给定的像素(i,j)∈I,在另一个图像中必须在另一个图像中对其相应的像素进行搜索。,正如我在第24堂课中所解释的那样,
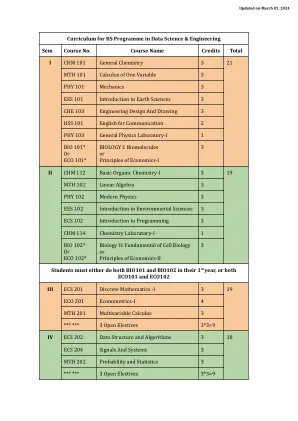
数据科学与工程课程的BS课程
Introduction to Computer Vision, Camera geometry and camera calibration, Review of Digital Image Processing, Edge Detection and Hough Transforms, Image Segmentation, Feature Point Detection - Harris, SIFT, HOG, LBP, STIP, Feature Detection, and Description - Bag Of Words, VLAD, Object Recognition - SVMs, Detection - Viola-Jones Object detector, Convolutional Neural Networks and Applications, Optical Flow, KLT based object tracking, Linear Algebra review, Projective Geometry - Basics and 2D transformations (Euclidean, Similarity, Affine, and Projective), Epipolar Geometry - Fundamental and Essential Matrix, Least Squares and Robust Estimation (RANSAC), Stereo reconstruction, SfM and Bundle Adjustment, Homography and panorama creation, Recent Progress in Computer Vision.

重播:通过...
摘要。3 D传感是自动驾驶汽车的基本任务。其部署通常依赖于对齐的RGB摄像机和激光镜头。谨慎的同步和校准,在LiDAR投影的深度图中,系统的错位持续存在。这是由于两个传感器之间的物理基线距离所致。工件通常反映为背景激光雷达错误地投射到前景上,例如汽车和行人。KITTI数据集使用立体声摄像机作为启发式解决方案来删除工件。但是,大多数AV数据集(包括Nuscenes,Waymo和DDAD)都缺少立体声图像,使Kitti解决方案不适用。我们提出了Replay,这是一种无参数的分析解决方案,用于删除投影伪像。我们在假设的虚拟LiDAR相机和RGB摄像机之间构建了一个Binocular视觉系统。然后,我们通过使用拟议的分析溶液确定面孔闭塞来删除投影伪影。我们显示出具有无伪像的深度图的最先进(SOTA)单眼估计器和3 d对象探测器的一致改进。

一种从空间立体影像中描绘建筑物足迹的混合方法
城市地区的地理空间数据库 [1]。高分辨率星载立体 (HRSS) 传感器(例如 GeoEye、WorldView、QuickBird)的发射开启了一个新时代,提供了从太空获取立体图像和 3D 地图的可能性 [2]。事实上,建筑物识别、重建和变化检测已经使用立体图像匹配以及 3D 边缘匹配技术进行 [3,5-6]。如 [3] 所述,基于立体图像的 3D 边缘匹配提供了有希望的结果,但前提是建筑物在数据的空间分辨率方面足够大、具有简单的矩形形状并且与周围物体相比具有良好的辐射对比度。事实上,虽然使用非常高分辨率的航空图像进行 3D 边缘匹配可以详细重建建筑物足迹 [7],但使用星载图像,同样的方法可能会遇到问题,特别是在两个核线图像中都无法清晰地检测到建筑物轮廓的情况下。此外,尽管影像匹配提供了表示建筑物高度的 DSM,但从该 DSM 中提取的建筑物大小和形状通常
一种从空间立体影像中描绘建筑物足迹的混合方法
从遥感图像中自动提取建筑物轮廓线已用于更新城市地区的地理空间数据库 [1]。高分辨率星载立体 (HRSS) 传感器(例如 GeoEye、WorldView、QuickBird)的发射开启了一个新时代,提供了从太空获取立体图像和 3D 地图的可能性 [2]。事实上,建筑物识别、重建和变化检测已经使用立体图像匹配以及 3D 边缘匹配技术进行 [3,5-6]。如 [3] 所述,基于立体图像的 3D 边缘匹配提供了有希望的结果,但前提是建筑物在数据的空间分辨率方面足够大、具有简单的矩形形状并且与周围物体相比具有良好的辐射对比度。事实上,虽然使用非常高分辨率的航空图像进行 3D 边缘匹配可以详细重建建筑物轮廓线 [7],但使用星载图像,同样的方法可能会遇到问题,特别是在两幅对极图像中都无法清晰检测到建筑物轮廓的情况下。此外,虽然影像匹配提供了代表建筑物高度的DSM,但是从该DSM提取的建筑物大小和形状通常被高估,因此需要辅助信息。
一种从空间立体影像中描绘建筑物足迹的混合方法
从遥感图像中自动提取建筑物轮廓线已用于更新城市地区的地理空间数据库 [1]。高分辨率星载立体 (HRSS) 传感器(例如 GeoEye、WorldView、QuickBird)的发射开启了一个新时代,提供了从太空获取立体图像和 3D 地图的可能性 [2]。事实上,建筑物识别、重建和变化检测已经使用立体图像匹配以及 3D 边缘匹配技术进行 [3,5-6]。如 [3] 所述,基于立体图像的 3D 边缘匹配提供了有希望的结果,但前提是建筑物在数据的空间分辨率方面足够大、具有简单的矩形形状并且与周围物体相比具有良好的辐射对比度。事实上,虽然使用非常高分辨率的航空图像进行 3D 边缘匹配可以详细重建建筑物轮廓线 [7],但使用星载图像,同样的方法可能会遇到问题,特别是在两幅对极图像中都无法清晰检测到建筑物轮廓的情况下。此外,虽然影像匹配提供了代表建筑物高度的DSM,但是从该DSM提取的建筑物大小和形状通常被高估,因此需要辅助信息。