XiaoMi-AI文件搜索系统
World File Search Systemips



IPS数据表IPS数据表
Piera IPS是一种基于读数的光子计数高度敏感的光电颗粒传感器。利用Piera的PCIC作为核心处理器,IPS紧凑,可以消耗低功率,同时可以快速获取和读数,并根据大小对微粒进行分类。IPS具有针对各种应用程序的可调节灵敏度控制。使用最先进的独特尺寸和计数算法来识别不同的颗粒,IPS适用于真正的实时精确空气寄生物质物质监测和粒度分布分析。通过Piera自动校准(Pascal)系统,将每个IPS校准为EPA批准的FEM参考仪器Grimm EDM180。可以在此处找到指定的参考和等效方法的列表,pg。68。
IPS 研究 - 新加坡
IPS 研究:83% 的新加坡人认为全球化有利于经济,但 50% 的人认为移民抢走了工作岗位 Tham Yuen-C 海峡时报,2021 年 9 月 23 日 新加坡 - 尽管世界各地对经济开放和全球人口大规模流动表示强烈反对,但新加坡人总体上对全球化持积极看法,83% 的受访者承认全球化的好处,这是政策研究所 (IPS) 关于民族自豪感和身份的研究发现。但超过一半的受访者也认为移民可能会抢走他们的工作,社会经济地位较低的人更有可能表达这种担忧。 该研究对来自全国代表性家庭样本的 2,001 名新加坡人和永久居民进行了调查,结果于周四 (9 月 23 日) 在《让身份在新加坡发挥作用:了解新加坡人的民族自豪感和身份》报告中公布。 IPS 首席研究员、社会实验室负责人、该研究的主要作者马修·马修斯 (Mathew Mathews) 表示,全球化对国家认同有着重大影响,在新加坡,全球化引发了关于外籍人力和自由贸易的争论。例如,最近,议会就外国专业人士、经理、工程师和技术人员以及印度-新加坡全面经济合作协定对新加坡人就业的影响进行了辩论。该研究于去年 (2020 年) 9 月至 11 月期间对民众进行了调查,询问受访者对全球化和移民的看法。绝大多数人(83%)认为全球化有利于经济和新加坡人。较小比例(17%)的人表示,全球化只有利于外国人和富人。关于移民问题,75% 的受访者在很大程度上或在一定程度上同意移民促进了经济发展,62% 的人同意新移民通过带来新的思想和文化改善了社会。即便如此,50% 的受访者认为移民抢走了新加坡人的工作,53% 的受访者认为政府在帮助他们方面投入了太多资金。社会经济地位较低、受教育程度较低的人更容易感受到竞争。研究中,社会经济地位较低的人是指居住在三室或更小的房屋委员会公寓中的人,而受教育程度为中学或以下的人则被认为受教育程度较低。

保护人工智能知识产权
摘要 人工智能 (AI) 算法在计算机视觉和自然语言处理等许多应用领域取得了突出的成果。AI 模型的性能是复杂且昂贵的模型架构设计和训练过程的结果。因此,对于模型所有者来说,保护他们的 AI 模型免遭盗版(模型克隆、非法分发和使用)至关重要。IP 保护机制已应用于 AI 模型,特别是深度神经网络,以验证模型所有权。已经调查了最先进的 AI 模型所有权保护技术。已经报告了 AI 模型所有权保护的优缺点。以前的大多数研究都集中在水印上,而指纹识别和证明等更先进的方法很有前景,但尚未深入探索。这项研究通过讨论该领域的可能研究方向得出结论。
IPS要求文档1C 零信任体系结构(ZTA) 会议概述 AWS上的生成AI 对IT收购工作的安全和隐私要求... 确保移动申请和设备 - [cio-it- ...
▪ Multi-factor Authentication for Privileged and User-Level Access - IA-2 (1) and IA-2 (2) ▪ Remediation of Critical and High Vulnerabilities – SI-2 ▪ Remote Code Execution Vulnerabilities – SI-2 ▪ Usage of End-of-Life Software – SA-22 ▪ System Architecture Review – PL-8, SA-8 ▪ Encryption of Sensitive Data (PII, PCI, Authenticators)无处不在 - SC-8,SC-8(1),SC-28,SC-28(1)▪与GSA的安全堆栈集成(内部系统)•SSPP第13节中的控制实现详细信息必须在安全授权边界内的资产/设备组之间提供详细的实施描述。•根据GSA IT安全程序指南06-30,“管理企业网络安全风险”,首席信息安全官(OCISO)办公室将审查SSPP,以确定其是否完整,一致,并满足信息系统的安全要求。根据审查的结果,SSPP可能需要进一步更新,也可能需要获得批准。

计划 - IPS 会议 NAGPUR 2025
小组成员 – RG Agarwal (Dhanuka Agritech Ltd)、KS Thyagrajan (PI Industries)、Komal Shah Bhukhanwala (SML Ltd)、Ravi Hegde (UPL)、Narendra Pal Gangwar (IPL Biologicals)、M. Ramasami (Rasi seeds)、Ashwin Kasikar (Ankur Seeds)、Anirban Gangopadhyay (巴斯夫)、VB Reddy (ATGC) Biotech)、Sumit Banerjee (AGMA Energy Pvt. Ltd)、Yashwant Patil (Syngenta)、Yogesh Mohite (Bayer Crop Sciences Ltd.)、Uday Philar (Sequoia Bio Sciences Pvt. Ltd.)、Pradeep Kumar (East-West Seed)、Satish Yadav (Crystal Crop Care) 茶歇前景(学生的职业机会) Sammelan ( SP雷乔杜里

利用纳米 IPS 提升显示技术
Nano IPS 显示器增强了色彩表现力。它们提供宽广的色域,覆盖数字电影行业标准 DCI-P3 色彩空间的 98% 和 sRGB 的 135%,非常适合专家级创意工作,例如具有大量色彩信息的高分辨率图像修饰。LG Nano IPS 显示器还配备了 VESA Display HDR™ 400 或 600(具体取决于显示亮度),可在屏幕最亮和最暗区域之间形成更鲜明的对比。凭借丰富而复杂的色彩表现力和更好的对比度,数字内容的色彩可以在各个类别中变得越来越生动逼真:
editco-supplied 802-30f IPS单元线
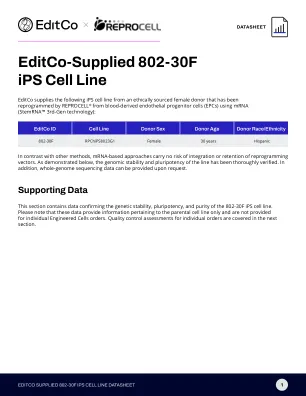
图1。核骨质表明802-30F细胞在基因组上是稳定的。*野生型802-30F细胞(通道19)的Karyostat结果表明基因组完整性已维持。全基因组视图以一个高级副本编号显示了所有体细胞和性染色体。平滑的信号图(右y轴)是log2比的平滑,它描述了微阵列上探针的信号强度。一个值为2表示普通拷贝数状态(CN = 2)。3的值代表染色体增益(CN = 3)。1的值表示染色体损失(CN = 1)。粉红色,绿色和黄色表示每个单独的染色体探针的原始信号,而蓝色信号表示用于识别副本数和畸变的归一化探针信号(如果有)。*改编自Thermo Fisher Scientific的描述。