XiaoMi-AI文件搜索系统
World File Search Systemrendering


Luminus 的全新 RGBL 混色 LED 技术提升了舞台和
加利福尼亚州桑尼维尔,2024 年 5 月 15 日,Luminus Devices 自豪地推出了一系列突破性的 4 合 1 RGBL(红-绿-蓝-黄绿色)LED,专为需要高输出混色和高显色指数 (CRI) 的舞台和建筑照明系统而设计。4 合 1 RGBL LED 各个发射器之间的间距最小,可提供无与伦比的混色能力,为照明设计师提供广泛的调色板来创造迷人的视觉效果。黄绿色(570 nm 主波长)通道取代了传统 4 合 1 LED 中使用的冷白色 LED,以扩大色彩空间并提高亮度。这些 LED 在最大电流下拥有一流的流明输出,同时保持超过 85 的高 CRI,确保在 3000K 至 8000K 的整个色温范围内提供明亮的照明。所有通道均可驱动高达 3A 和 100% DC,从而实现高流明输出且可靠性不打折扣。

iffusion r Enderer:视频扩散模型
理解和建模照明效应是计算机视觉和图形中的基本任务。经典的基于物理的渲染(PBR)准确模拟了光线传输,但依赖于精确的场景表示形式 - 说明3D几何,高质量的材料和照明条件 - 在现实世界中通常是不切实际的。因此,我们介绍了一种iffusion r Enderer,这是一种神经方法,该神经方法解决了整体框架内的反向和正向渲染的双重问题。杠杆功能强大的视频扩散模型先验,逆装置模型准确地估算了现实世界视频中的G-buffers,为图像编辑任务提供了一个接口,并为渲染模型提供了培训数据。相反,我们的重新设计模型从G-buffers产生了无明确的光传输模拟的影像图像。具体来说,我们首先训练一个视频扩散模型,用于构成综合数据的反向渲染,该模型可以很好地推广到现实世界的视频,并使我们能够自动化不同标签的真实世界视频。我们
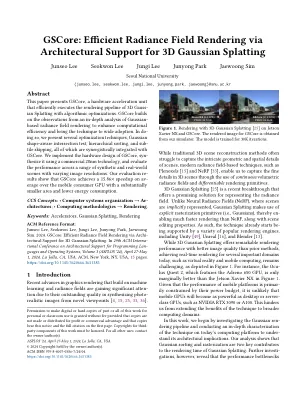
GSCORE:通过3D高斯脱落的架构支撑效率的有效辐射场渲染
摘要本文介绍了GSCORE,这是一个硬件加速器单元,该单元有效地执行了使用算法优化的3D Gauss-ian剥落的渲染管道。GSCORE基于对基于高斯的辐射场渲染的深入分析的观察,以提高计算效率并将技术带入广泛采用。在此过程中,我们提出了几种优化技术,高斯形状感知的交叉测试,分层排序和下图跳过,所有这些都与GSCORE协同集成。我们实施了GSCORE的硬件设计,使用商业28NM技术进行合成,并评估具有不同图像分辨率的一系列合成和现实世界场景的性能。我们的评估要求表明,GSCORE在移动消费者GPU上实现了15.86倍的速度,其面积较小,能源消耗较低。

从修辞的角度来看全球化和本地化翻译策略:将英语头条渲染为乌克兰人
摘要。本文在发明的修辞经典框架内提出了一种全球化和本地化策略的想法,内容涉及选择论点;处置,处理他们的安排; Elocution,针对语言单位的选择;表演,以不同种类的话语形成的基础。翻译的全球化策略将国际内容带入目标语言,而倾向或省略的变化将略有变化,而本地策略则将全球内容调整为特定修辞级别的本地读者变化文本组织的世界观。本文讨论了全球化和本地化策略在英国广播公司(BBC)的英语在线标题转化为乌克兰人的三个结构位置上的应用:通过前景单位吸引注意力,以谓语群体保持其关注,使读者在最终的位置上迈向读者。发现,乌克兰对英语头条的翻译加强了全球化策略,扩展了宽松的话语,迫使读者转向文本,而本地化策略是通过规范技术或观点实施的,从而改变了对当地观众对原始观众的原始标题的处理,从而改变了原始标题。

ALS患者衍生的运动神经元网络表现出微观功能障碍和中尺度补偿,使它们非常容易受到扰动
摘要肌萎缩性侧硬化症会影响上和下运动神经元,从而导致进行性神经病理学,从而在症状发展前很久就会导致受影响神经网络的结构和功能改变。某些遗传突变,例如C9ORF72中的扩张,使运动神经元群体诱发病理功能障碍。但是,尚不清楚潜在的病理倾向如何影响脆弱网络内的结构和功能动力学。在这里,我们研究了ALS患者衍生的运动神经元网络的微观和中尺度动力学。我们首次表明,ALS患者衍生出具有内源遗传易感性的运动神经元,以细胞质TDP-43夹杂物的形式发展出经典的ALS细胞病理学,并自组织为计算效率高效的网络,尽管具有与健康的对照组相比具有更高的代谢成本的功能标志。这些标志包括微观障碍和中尺度补偿,包括功能集中度增加。此外,我们表明这些网络通过表现出诱导的多动症而极易受到短暂扰动的影响。

intrinsicavatar:通过显式射线跟踪
我们提出了intincavatar,这是一种新的方法,是一种从单眼视频中照亮的,包括几何形状,反照率,材料和环境的内在特性。基于人类的神经渲染的最新进展已使来自单眼视频的穿着人类的高质量几何形状和外观重建。然而,这些方法烘烤了内在特性,例如反照率,材料和环境照明成一个单一的纠缠神经表示。另一方面,只有少数作品可以解决估计单眼视频中穿衣人类的几何形状和分离的外观特性的问题。,由于通过学习的MLP对次要阴影效应的近似值,他们通常会获得有限的质量和分离。在这项工作中,我们建议通过蒙特卡罗射线跟踪明确地对次级阴影效应进行建模。我们将衣服的人体的渲染过程建模为体积散射过程,并将射线跟踪与人体的作用相结合。我们的方法可以从单眼视频中恢复服装人类的高质量地理,反照率,材料和照明特性,而无需使用地面真相材料进行监督的预训练。fur-hoverore,因为我们明确地对体积散射过程和射线追踪进行了建模,所以我们的模型自然而然地形成了一般 -

co-OCC:耦合显式特征融合与体积渲染多模式3D语义占用预测的正规化 - 补充材料
图1(a)说明了对外部参数不准确引起的对齐图像和点云的挑战。很难实现直接的几何对齐。要解决因未对准而导致的错误的积累,我们提出了GSFusion。此方法搜索附近的功能,以确保几何和语义对齐,从而使每个LiDAR Voxel功能能够与融合过程中的K相邻升起的像素特征进行交互。这扩大了感知字段,从而使图像和点特征更全面,更强大。此外,图。1(b)突出显示了激光点云的稀疏性对与摄像机相互作用的影响。为了解决这个问题,渲染过程可确保LIDAR功能,相机功能或LIDAR相机功能的密集表示,如图1(c)。这确保了足够的体素相互作用并提高整体性能。
![[Roscon de 2023]使用ROS 2和Modern Gazebo学习机器人技术基础](/simg/a\af59caffa095f288f9d03f71229bacdcfb6e35d8.webp)
[Roscon de 2023]使用ROS 2和Modern Gazebo学习机器人技术基础
● gz-physics physics engines ( Bullet , DART , TPE ) ● gz-rendering rendering ( OGRE ) ● gz-sensors sensor simulation ● gz-gui GUI ● Many existing systems and example worlds ● Custom systems (plugins) ● Fuel simulation models
g u i d e b o o k 18-20 9月
驾驶模拟会议收集了来自工业和学术社区以及商业模拟提供商的驾驶模拟专家。这个第23版遵循2023年的Antibe在Antibs举行的混合动力版本,约有300多个参与者。展览将返回40位专业参展商,最多400名现场参与者。With about 80 speakers in scientific and industrial product solution sessions, keynotes, tutorials and round tables, you will get the latest trends in XIL (MIL, SIL, HIL, DIL, VIL, CIL) and XR simulation for ADAS, automotive HMI and driving simulation design, motion sickness and rendering, as well as connected and autonomous vehicle verification