XiaoMi-AI文件搜索系统
World File Search Systemworkspace
企业托管工作区
详细的物品可分解针对与房地产链接的所有资本支出的各个方面分解。包括所有费用。除了(如果需要的话,可以添加到解决方案成本中)电线等。 OPEX•包含:•员工成本(FM/Janitorial/Technicer)•安全管理•清洁工/人员厕所的消耗品•合适•电费(包括HVAC和冰冷的水费 @ 12x5)•现场服务•R&M,AMC/CARPET CLEATING/PEST CLEATING/PEST COLTAND/DIV>控制等)控制等) •保险保证金 @ xx%保证金详细信息共享详细的物品可分解针对与房地产链接的所有资本支出的各个方面分解。包括所有费用。除了(如果需要的话,可以添加到解决方案成本中)电线等。 OPEX•包含:•员工成本(FM/Janitorial/Technicer)•安全管理•清洁工/人员厕所的消耗品•合适•电费(包括HVAC和冰冷的水费 @ 12x5)•现场服务•R&M,AMC/CARPET CLEATING/PEST CLEATING/PEST COLTAND/DIV>控制等)控制等) •保险保证金 @ xx%保证金详细信息共享详细的物品可分解针对与房地产链接的所有资本支出的各个方面分解。包括所有费用。除了(如果需要的话,可以添加到解决方案成本中)电线等。 OPEX•包含:•员工成本(FM/Janitorial/Technicer)•安全管理•清洁工/人员厕所的消耗品•合适•电费(包括HVAC和冰冷的水费 @ 12x5)•现场服务•R&M,AMC/CARPET CLEATING/PEST CLEATING/PEST COLTAND/DIV>控制等)控制等) •保险保证金 @ xx%保证金详细信息共享详细的物品可分解针对与房地产链接的所有资本支出的各个方面分解。包括所有费用。除了(如果需要的话,可以添加到解决方案成本中)电线等。OPEX•包含:•员工成本(FM/Janitorial/Technicer)•安全管理•清洁工/人员厕所的消耗品•合适•电费(包括HVAC和冰冷的水费 @ 12x5)•现场服务•R&M,AMC/CARPET CLEATING/PEST CLEATING/PEST COLTAND/DIV>控制等)•保险保证金 @ xx%保证金详细信息共享

工作区环境管理2308
配置文件管理 - 提供最佳的登录性能,Workspace环境操作替换了常用的Windows组策略对象,登录脚本和偏好,并使用部署在每个虚拟机或服务器上的代理。代理是多线程,并且仅在需要时才对用户环境进行更改,从而确保用户始终可以尽快访问其桌面。

Citrix Workspace应用iOS
应用程序保护是Citrix Workspace应用程序的功能,它在使用Citrix虚拟应用程序和已发布资源时提供了增强的安全性。此功能限制了通过钥匙营和屏幕捕获恶意软件损害客户端的能力。APP保护可防止机密信息的渗透,例如屏幕上显示的用户凭据和敏感信息。该功能可防止用户和攻击者拍摄屏幕截图,而无法使用钥匙记录器来捕获和利用敏感信息。

Computer™&Workspace™-Shamir
Shamir Computer™ / Workspace™镜头旨在显着提高15英寸至5英尺或10英尺范围内的视觉清晰度和舒适性。Shamir Computer™和Workspace™镜头功能配置文件唯一针对近视区域进行了优化。适用于小型,封闭的工作区,Shamir Computer™提供了15英寸至5英尺范围内的视觉清晰度和舒适性,通常需要方便阅读和计算机使用。Shamir Workspace™提供了类似的功能,同时扩展了较大的办公室和开放空间的视觉范围,并在更大的距离内提供视觉舒适度,最多可达10英尺。这两个镜头都适合最自然和最符合人体工程学的姿势,有助于减少向前或向后倾斜头的需求,或者降低或抬起物体以实现方便的观察。
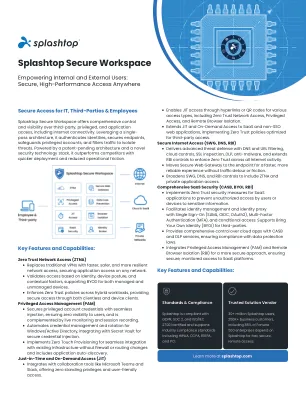
Splashtop安全工作区
Splashtop Secure Workspace提供了第三方,特权和应用程序访问(包括Internet连接)的全面控制和可见性。利用单个通过体系结构,对身份进行身份验证,确保端点,保障账户并过滤流量以隔离威胁。由正在申请专利的建筑和新颖的安全技术堆栈提供支持,它的部署更快和减少了操作摩擦,优于竞争对手。
利用您的工作空间:新视角
Experience per SF™ 科学地证明了您的工作场所环境与员工敬业度之间存在直接关联。无论您是首席执行官、首席财务官还是房地产、人力资源或 IT 领域的领导者,我们的流程都能准确找出员工工作场所体验的驱动因素,并为您提供切实可行的见解,为您的员工创造无与伦比的体验。Experience per SF™ 是唯一一款能够为您的工作增加工作场所体验杠杆的工具,可提高员工敬业度、生产力和盈利能力。1
经认可的平价办公空间提供商名单
HomeWork 目前在伦敦西南部、普特尼、南菲尔德、富勒姆百老汇和旺兹沃思设有 4 个办公地点,均签订了租赁协议。普特尼办公地点于 2019 年 8 月开业,占地 1800 平方英尺,拥有 55 张办公桌和 1 间会议室。南菲尔德于 2021 年 6 月开业,占地 6500 平方英尺,拥有 104 张办公桌、4 间私人办公室和 4 间会议室。富勒姆百老汇于 2022 年 4 月开业,占地 4500 平方英尺,拥有 85 张办公桌、3 间私人办公室和 2 间会议室。旺兹沃思于 2023 年 2 月开业,占地 3800 平方英尺,拥有 76 张办公桌、6 间私人办公室和 2 间会议室。HomeWork 共有 18 名员工,分布在 4 个办公地点和中央团队。每个办公室都由一名位置经理和一支前台团队管理,他们负责工作区和空间前面的特色咖啡馆。我们有一名工作人员在现场,从早上 8 点到下午 6:30 为客户提供服务、管理预订系统并开展销售活动。在我们的一个站点(富勒姆),我们在晚上 6:30 到晚上 11 点之间提供非工作时间访问。我们使用预订管理系统(Nexudus)来存储客户预订和合同数据,并运行访问控制系统,允许客户自行进出工作区。每个地点都提供共享办公桌、电话亭、会议室、私人办公室、共享休息空间、接待服务(邮件处理等)、Wi-Fi、特色咖啡馆和定期的社交活动。我们的空间设计温馨,我们为当地专业人士建立了一个社区,初创企业和小型企业可以在其中成长和发展。我们现有的数据库有超过 10,000 个联系人。我们的许多客户来自周边的当地社区,因此我们之前曾使用乙烯基广告宣传工作区在发布前提供优惠。我们还与当地企业建立了牢固的关系,以合作提供优惠、活动和促销。目前,我们 50% 的空间由拥有永久办公桌的个人和团队占用,其余空间可供临时客户或预购日票的客户临时使用。 托管业务类型和提供的典型合同条款

Citrix Workspace App 2408 for Linux
•支持RHEL 9.4 x86-64,Ubuntu 2204 X86‑64,Raspberry pi os Bullseye -Arm64,Debian 11.9 X86-64•增强的虚拟台式屏幕屏幕屏幕屏幕筛选体验•增强的桌面查看器工具键•自定义•自定义•自定义的台式•增强台式图表•增强台式图表•增强的台式图表•增强的台式图形• multi‑factor (nFactor) authentication • Enhancement to Storebrowse commands • Multiple webcam resolutions support • Fast smart card • Improved loading experience for shared user mode • Support for Optimized Microsoft Teams on ARM64 devices • Version upgrade for Chromium Embedded Framework • App protection • Provision to manage multiple proxy servers • Support for Cryptography Next Generation smartcards • Manage settings for user groups using configuration profile [技术预览]•NFC对FIDO2身份验证的支持[技术预览]•增强的统一通信SDK API [技术预览]•支持UCSDK中的WebHID API [技术预览]•支持浏览器的浏览式身份验证对H.264和H.265硬件预览的浏览器内容验证[ [技术预览]