XiaoMi-AI文件搜索系统
World File Search System仪表化


跑道视距观察和报告实践
better-than.tv › icaodocs PDF 2010 年 7 月 6 日 — 2010 年 7 月 6 日 9.3 仪表化的 RVR 系统的完整性和可靠性……雪是限制飞机运行的因素之一。
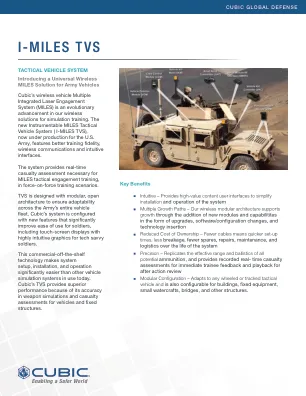
I-MILES 电视
Cubic 的无线车载多路综合激光交战系统 (MILES) 是我们用于模拟训练的无线解决方案的一次革命性进步。新型可仪表化 MILES 战术车辆系统 (I-MILES TVS) 目前正在为美国陆军生产,具有更好的训练保真度、无线通信和直观界面。该系统在对抗训练场景中提供 MILES 战术交战训练所需的实时伤亡评估。

基于高温形状记忆合金的压紧执行器的开发和鉴定
• 在测量方面,开发之初讨论的测量方法(如称重传感器)与环境测试(热、振动和冲击)的限制不兼容。新的解决方案(如带有应变计的拉杆仪表)已经实施,并将在资格认证活动期间使用。这种仪表化的拉杆将以 FM 的形式出售。• 经过大量研究,机械和热裕度确保在任何情况下,Trigger 都能正常触发。• 全聚酰亚胺加热器能够在高温和高密度功率下短时间运行,而不会出现明显性能下降。当应用需要非常短时间使用时,它允许全聚酰亚胺加热器以高于 ECSS 标准中指示的功率密度使用。
共享单车自主起飞和降落 ...
自 20 世纪 90 年代末以来,SAAB 一直在对几种无人驾驶飞行器 (UAV) 概念进行初步研究,但并未将其用于飞行演示。2001 年,决定启动 SHARC 技术演示项目:一个小型专业团队负责开发、制造和飞行测试一个无人机系统,包括航空电子系统和地面控制站 (GCS),该系统稍后可在稍后开发的第二个演示器(称为 FILUR)中重复使用(见图1)。由于预算有限,并且从仪表化小尺寸飞机的飞行测试中获得良好的内部经验,因此决定 SHARC 技术演示器应为原始 SHARC 设计的 1:4 比例。该项目的主要目标之一是测试军用无人机的适航过程,即使使用小尺寸飞机也可以实现这一目标。甚至测试演示者的精益开发流程的目标也可以通过这种方式实现。SHARC 项目于 2001 年启动,不到一年后首次飞行,

嵌入式微机械设备方法的表征 MEMS 与 CMOS 单片集成
最近,人们对将微机电系统 (MEMS) 与驱动、控制和信号处理电子设备进行单片集成的制造工艺产生了浓厚的兴趣。这种集成有望提高微机械设备的性能,并降低制造、封装和仪表化这些设备的成本,方法是将微机械设备与电子设备在同一制造和封装过程中结合起来。为了保持模块化并克服 CMOS 优先集成方法的一些制造挑战,我们开发了一种 MEMS 优先工艺。该工艺将微机械设备放置在浅沟槽中,对晶圆进行平面化,并将微机械设备密封在沟槽中。然后,在将设备嵌入沟槽后进行高温退火,然后再进行微电子加工。这种退火可以消除微机械多晶硅的应力,并确保与微电子加工制造相关的后续热处理不会对多晶硅结构的机械性能产生不利影响。然后,这些带有已完成的平面化微机械器件的晶圆被用作传统 CMOS 工艺的起始材料。该工艺的电路成品率已超过 98%。本文介绍了集成技术、该技术的改进以及器件特性的晶圆级参数测量。此外,本文还介绍了使用该技术构建的集成传感器件的性能。

百叶窗对日光光电控制的影响...
摘要 我们研究了百叶窗(一种常见但光学复杂的开窗系统)如何导致日光照明控制系统的性能不可靠。利用一个全仪表化的全尺寸试验台设施,我们监测了一年中私人办公室中改进的闭环比例光电控制系统的日光照明性能。日光与光电传感器信号的工作平面照度之比以太阳条件和百叶窗角度为特征。该比率的变化会导致实际照度水平周期性不足。安装人员可以使用这种类型的特性来确定在调试期间进行的初始控制调整是否会在大多数日光条件下带来可靠的性能。根据我们对这一具体案例研究的观察,我们谨慎地给出了调试指南。我们量化了该比率变化对控制性能的影响。使用中等增益常数,在一年中的 91% 时间内,监测到的工作平面照度水平不会低于设计设定值的 90%。当出现差异时,日光相关性和测量条件之间的差异是工作平面照度不足的主要原因。此性能不适用于市售的闭环比例系统,因为 1) 典型系统很少在安装时正确调试
基于稳健深度学习激光雷达的自主太空着陆器姿态估计
在太空着陆操作期间,准确估计航天器的相对姿态对于确保安全成功着陆至关重要。本文提出了一种基于 3D 光检测和测距 (LiDAR) 的 AI 相对导航架构解决方案,用于自主太空着陆。所提出的架构基于混合深度循环卷积神经网络 (DR-CNN),将卷积神经网络 (CNN) 与基于长短期记忆 (LSTM) 网络的循环神经网络 (RNN) 相结合。获取的 3D LiDAR 数据被转换为多投影图像,并将深度和其他多投影图像输入 DRCNN。该架构的 CNN 模块可以有效地表示特征,而 RNN 模块作为 LSTM,可提供鲁棒的导航运动估计。我们考虑、模拟和实验了各种着陆场景,以评估所提出架构的效率。首先使用 PANGU(行星和小行星自然场景生成实用程序)软件创建基于 LiDAR 的图像数据(范围、坡度和海拔),然后使用这些数据对所提出的解决方案进行评估。建议使用 Gazebo 软件中的仪表化空中机器人进行测试,以模拟在合成但具有代表性的月球地形(3D 数字高程模型)上着陆的场景。最后,使用配备 Velodyne VLP16 3D LiDAR 传感器的真实飞行无人机进行真实实验,以在设计的缩小版月球着陆表面上着陆时生成真实的 3D 场景点云。所有获得的测试结果表明,所提出的架构能够通过良好合理的计算提供良好的 6 自由度 (DoF) 姿势精度。

对高空旋翼空气力学的基本理解...
1.1 复合直升机示例。........................3 1.2 倾转旋翼飞机示例。。。。。。。。。。。。。。。。。。。。。。。。。3 1.3 前飞对后退叶片速度的影响。.........4 1.4 同轴反向旋转旋翼能够在前飞期间保持每个旋翼的升力不对称,每个旋翼的力矩相互抵消。通过消除后退叶片升力来平衡旋翼力矩的需要,可以缓解后退叶片失速,就像在单旋翼飞行器中一样(左图)[5]。..。。。。。。。。。。。。。。。。。。。。。。。。..4 1.5 兰利全尺寸风洞中的 PCA-2 转子测试装置 [11]。.9 1.6 带有悬臂转子配置的 Meyer 和 Falabella 风洞测试装置 [12]。.............................10 1.7 叶片表面压力端口的展向和弦向位置 [12]。11 1.8 零铰链偏移转子的轮毂组件,显示来自叶片的压力管连接到轮毂内的压力拾取器 [12]。.12 1.9 1965 年詹金斯在兰利全尺寸风洞中的测试装置 [13]。.14 1.10 高前进比时转子推力和 H 力系数与总距 (A0) 的关系,显示总距推力反转 [13]。..........15 1.11 反向速度转子风洞模型中使用的“可逆”翼型截面轮廓 [16]。.........................18 1.12 为反向速度转子风洞模型开发的每转两个斜盘 [16]。.。。。。。。。。。。。。。。。。。。。。。。。。...19 1.13 在恒定盘面载荷下测量的有效转子升阻比,以提高前进比 [16]。.......................21 1.14 升力对总距比与前进比的敏感度变化 [16]。....22 1.15 位于 NASA 艾姆斯研究中心 40 x 80 英尺 NFAC 风洞中的仪表化 UH-60A 空气负载旋翼 [17]。...。。。。。。。。。。。。。。。。。。。。。。24 1.16 压力传感器在仪表旋翼叶片上的分布 [17] 24 1.17 UH-60A 减速旋翼风洞试验中明显的集体推力反向趋势 [18]。...................................26 1.18 不同推进比下的升阻比与升力零和正 4 度轴,40% NR [18]。。。。。。。。。。。。。。。。。。。。。。。27
TouringMachines:动态、合理、移动代理的架构
自动化工厂、核电站、电信中心和空间站等设施的计算机控制操作环境正变得越来越复杂。随着这种复杂性的增长,使用集中管理和调度策略来控制此类环境将变得越来越困难,这些策略既能应对意外事件,又能灵活应对可能随时间发生的操作和环境变化。解决这个问题的一个越来越有吸引力的方法是将此类操作的控制权分配给许多智能的、能够完成任务的计算代理。现实世界领域可能由多个代理组成。在这样的领域中,代理通常会执行许多复杂的任务,这些任务需要在一定程度上关注环境变化、时间限制、计算资源界限以及代理的短期行动可能对其长期目标产生的影响。在现实世界中操作意味着必须在时间和空间的多个粒度级别上处理意外事件。虽然代理必须保持反应才能生存,但如果代理要与其他代理协调行动并以有效的方式处理复杂任务,则需要一定程度的战略和预测决策。本论文提出了一种新的集成代理架构,旨在为理性、自主、移动的代理提供在动态、实时、多代理领域中执行复杂、资源受限任务通常所需的各种行为。在调查了一系列现有架构并充分考虑了在特定此类领域中产生有效、稳健和灵活行为的要求后,通过集成许多审议和非审议控制功能,设计了最终的软件控制架构——TouringMachine 代理架构。这些功能以分层方式排列,组合起来赋予代理丰富的反应、目标导向、反思和预测能力。考虑到代理的内部配置、任务环境和随后的行为库之间存在的复杂关系,代理架构已与功能丰富的仪表化模拟测试平台结合实施。该测试平台允许创建一组不同的单代理和多代理导航任务场景,已用于评估架构的实用性并确定其一些主要优点和缺点。