XiaoMi-AI文件搜索系统
World File Search System刚体
SO(3)和SE(3)躺在刚体旋转的代数...
1尽管在第3.1节中正式定义了 1,但它们可以非正式地理解为那些符合欧几里得几何形状的五个公理的 1(1 st的事物(等于同一事物的1件事也等于彼此),如果将等于等值的零件等于相等;彼此彼此相等。 2对象的姿势既包括其位置和态度。1,但它们可以非正式地理解为那些符合欧几里得几何形状的五个公理的 1(1 st的事物(等于同一事物的1件事也等于彼此),如果将等于等值的零件等于相等;彼此彼此相等。 2对象的姿势既包括其位置和态度。1(1 st的事物(等于同一事物的1件事也等于彼此),如果将等于等值的零件等于相等;彼此彼此相等。2对象的姿势既包括其位置和态度。

physgen:刚体物理的图像与视频生成
摘要。我们提出了一种新颖的图像到视频生成方法,该方法将转换单个图像和输入条件(例如,将力和扭矩应用于图像中的对象),以产生一种现实,物理上合理的和时间一致的视频。我们的关键见解是将基于模型的物理仿真与数据驱动的视频通用过程集成,从而实现了合理的图像空间动力学。我们系统的核心是三个核心组成部分:(i)有效捕获图像的几何形状,材料和物理参数的图像理解模块; (ii)使用刚体物理和推断参数来模拟实体行为的图像空间动力学模拟模型; (iii)基于图像的渲染和完善模块,利用生成视频扩散来产生具有模拟运动的逼真的视频镜头。由此产生的视频在物理和外观上都是实现的,甚至是可控制的,从而通过定量比较和全面的用户研究来表现出优于现有数据驱动的图像到视频的效果。Physgen的结果视频可用于各种下游

一种用于机器人臂和刚体的基于量子计算的新算法
1机械工程系,魁北克大学氢和研究所的机械工程系,3351 BOULEVARD DES FORGES,TROIS-RIVIères,QC G8Z 4M3,加拿大,电子邮件,电子邮件:nadjet.zioui@uqqtr.ca 2 Ezzouar,16111年,阿尔及利亚,阿尔及利亚,电子邮件:yousra.mahmoudi@uqtr.ca 3城市液压部,国立液压学院Arbaoui Abdallah,29号,布里达路线29,阿尔及利亚4Véo4Véo项目,Sherbrooke,Sherbrooke,2500 de l'电子邮件:aicha.mahmoudi@usherbrooke.ca 5流程控制实验室,国家理工学院,阿尔及利亚,阿尔及利亚,电子邮件:mohamed.tadjine@g.enp.enp.edu.dz 6工程与科学学院,挪威西部挪威大学应用科学大学,北挪威大学,北北,5063,5063,Email,电子邮件: say.bentouba@hvl.no
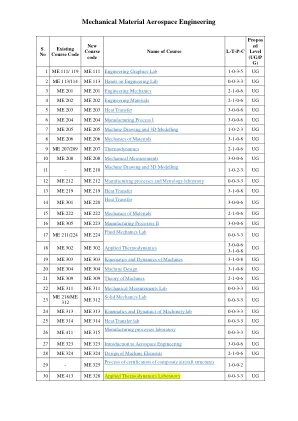
机械材料航空工程
模块5:虚拟工作和能量方法 - 虚拟位移,粒子的虚拟工作原理以及刚体的理想系统,自由度。主动力图,有摩擦的系统,机械效率。保守力和势能(弹性和重力),平衡的能量方程。能量法对平衡的应用。平衡的稳定性。模块6:颗粒动力学 - 颗粒的运动学:直线运动,平面曲线运动 - 矩形坐标,正常和切向坐标,极性坐标,空间曲率 - 圆柱 - 圆柱形,球形(球形(坐标),相对和约束运动。颗粒动力学:力,质量和加速度 - 直线和曲线运动,工作和能量,脉冲和动量 - 线性和角度;影响 - 直接和倾斜。颗粒系统动力学:牛顿的第二定律,工作能源,脉冲弹药,能量的保护,能量和动量模块7:刚体的刚性身体动力学介绍:刚体旋转的方程式,用于在固定轴上旋转固定轴旋转固定轴的固定平面,一般平面运动,旋转平面运动的旋转旋转的旋转旋转的旋转架子旋转的旋转旋转旋转的旋转。coriolis刚体刚体的加速动力学:刚体的运动方程,平面运动中刚体的角动量,刚体的平面运动和D'Alembert的原理,刚体的系统,刚体的系统,限制了平面运动;作用在刚体上的力和作用,平面运动中刚体的动能,刚体的系统,能量保护,刚体的平面运动 - 脉冲和动量,刚体的系统,刚体的系统,保护角动量。

使用非递归和递归刚体动力学的高效系留气球模型公式
推荐引用 推荐引用 Hembree, Bradley C.,“使用非递归和递归刚体动力学的高效系留气球模型公式”(2010 年)。学位论文。260。https://louis.uah.edu/uah-dissertations/260

代表不同坐标系中的量子旋转,用于建模刚体方向
1。简介compution countientation在包括机器人技术和航空设备在内的许多领域中,刚体的方向是一项重要任务。特定于机器人技术,定向在许多工业,医疗和手术应用中起着基本作用。各种方法通常用于建模和表示刚体的方向,例如球形坐标和欧拉角,或偏航,俯仰和滚动(YPR)角度。这些方法使用3 3个矩阵来保存三个单元向量的投影坐标,从而使它们成为内存和资源密集型。相比之下,还开发了紧凑的方法,例如四季度和双重四季度。此代表仅使用四个组件:一个真实和三个虚构部分。上述所有方法已成功用于多个应用程序;
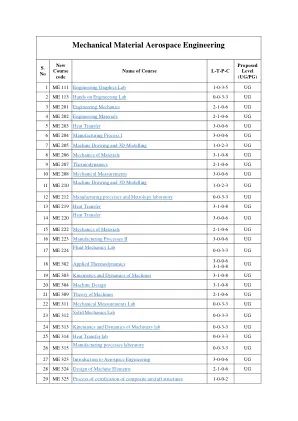
机械材料航空航天工程
模块 5:虚功和能量法- 虚位移、质点虚功原理和理想刚体系统、自由度。主动力图、有摩擦系统、机械效率。保守力和势能(弹性和重力)、平衡能量方程。能量法在平衡中的应用。平衡稳定性。模块 6:粒子动力学- 粒子运动学:直线运动、平面曲线运动 - 直角坐标、法向和切向坐标、极坐标、空间曲线 - 圆柱、球面(坐标)、相对运动和约束运动。粒子动力学:力、质量和加速度 - 直线和曲线运动、功和能量、冲量和动量 - 线性和角向;冲击 - 直接和斜向。粒子系统动力学:广义牛顿第二定律、功、冲量、能量和动量守恒定律 模块 7:刚体动力学简介 平面刚体运动学:刚体绕固定轴旋转的方程、一般平面运动、平面运动中的瞬时旋转中心、粒子相对于旋转框架的平面运动。科里奥利加速度平面刚体动力学:刚体运动方程、平面运动中刚体的角动量、刚体的平面运动和达朗贝尔原理、刚体系统、受限平面运动;作用于刚体上的力的能量和功、平面运动中刚体的动能、刚体系统、能量守恒、刚体的平面运动 - 冲量和动量、刚体系统、角动量守恒。

机器人操作的数学导论
2 刚体运动 19 1 刚体变换 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ... . ...

机电一体化工程 - 入学先决条件
颗粒和刚体的物理学运动学(位置,线性和旋转运动中的速度和加速度);颗粒和刚体的动力学(力和力矩,牛顿运动定律);刚体的平衡;拉格朗日方程;节能原则(工作,能源和权力);热力学;热运输(传导,对流,辐射);电磁学(Coloumb的法律,生物 - 萨瓦特法律,高斯法律,麦克斯韦法律)。