XiaoMi-AI文件搜索系统
World File Search System前部

使用表面速度和高程的观察结果验证UpernavikIsstrøm(1985- 2019年)的合奏历史模拟
响应气候变暖的潮汐水冰川的未来是格陵兰冰盖对全球海平面上升的贡献的最大不确定性来源之一。在这项研究中,我们研究了冰片模型通过开处方前部的质量和表面升高的过去演变的能力。为了实现这一目标,我们通过Weertman和正规化的-Coulomb摩擦法运行了两个模拟。我们表明,冰流模型必须包括在快速流动区域的冰锋上游的前15公里中减少摩擦,以捕获1985年至2019年期间观察到的趋势。没有这个过程,整体模型高估了2005年沿前部撤退之前的冰流,并且在撤退期间没有完全再现其加速度。这导致了1985年至2019年之间总质量损失的50%(300 vs 200 GT)的高估。使用基于方差的灵敏度分析,我们表明,摩擦定律和冰流法的不确定性对模型结果的影响要比表面质量平衡和初始表面升高更大。

导弹防御局灵活目标系列环境...
灵活目标系列环境评估机构:导弹防御局行动:无重大影响的草案调查结果背景:根据《国家环境政策法》(NEPA);执行 NEPA 的环境质量委员会法规(《联邦法规汇编》[CFR],第 40 章,第 1500-1508 部分);国防部指令 4715.9《环境规划和分析》;以及执行这些法律法规的适用服务法规,导弹防御局 (MDA) 已就拟议的灵活目标系列 (FTF) 做出无重大影响的调查结果 (FONSI)。FTF 将通过使用一组通用助推器、前部和组件来组装各种不同的目标配置,从而简化 MDA 的目标获取过程。用于运输、测试和处理组装目标的专用设备也是 FTF 的一部分,并在 FTF 环境分析 (EA) 中记录的分析中予以考虑。MDA 已确定为 FTF 准备的 EA 代表了对相关环境影响范围和水平的准确和充分的分析。拟议行动说明:MDA 提议通过使用通用流程和程序以及通用核心组件来组装标准化的目标助推器、前部和组件库存,以简化其目标开发和采购流程。这将提高目标可靠性,最大限度地降低成本并缩短目标生产时间。EA 考虑了 FTF 的开发、准备、组装、集成、测试、运输和使用,以支持 BMDS 测试。开发将包括新助推器和目标或技术的概念和物理开发。准备工作包括预组装工作,在某些情况下,还包括对发动机进行微小改装。组装、集成和测试包括连接目标导弹前部、级间和助推器;装载模拟物或炸药;旋转目标前部以确认重量分布正确;以及测试电子设备和组件。如有必要,目标可以存储在集成设施中(液体目标将不加燃料存储)。组装好的目标将通过卡车、飞机和驳船运输到发射/集结地点,以进行陆上、海上和空中发射。需要进行场地准备和建设以容纳 FTF 的陆地发射地点包括阿拉斯加科迪亚克岛科迪亚克发射中心 (KLC)、加利福尼亚州范登堡空军基地 (VAFB)、马歇尔共和国梅克岛美国陆军夸贾林环礁/罗纳德·里根弹道导弹防御试验场 (USAKA/RTS)
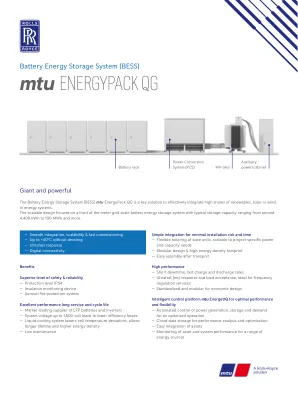
mtu energypack QG
电池储能系统(BESS)MTU ENERGYPACK QG是有效地将可再生能源,太阳能或风能的高份额集成到能量系统中的关键解决方案。可扩展的设计集中在仪表网刻度电池存储系统的前部,典型的存储容量范围从约4,400 kWh到100 MWH及更多。


BrainAccess HALO 版本 2.0
• 戴上头带。首先,将头带的前部放在前额上,然后拉动头带的后部以将其拉长,将其放低到位并松开。如果头带太紧或太松,请使用调节装置来拉长或缩短松紧带。确保前电极的位置使得参考电极位于前额的中心,而后电极位于枕骨皮质区域上方。
腺样体评估中射线参数的可靠性
图 2。椎腔 X 射线参数。(A): Ba:椎底(枕骨大孔前缘的最下点);EsfL:蝶骨线(与蝶骨下缘相切,与 Ba 成正比);PL:腭线(从鼻棘前部到鼻棘后部);Pm:翼上颌线(鼻底边缘与上颌骨后缘的交点);PmL:翼上颌线(与 Pm 成垂直于 PL 成正比);aa:寰椎前部(寰椎最前点);aaL:寰椎前线(与 aa 成垂直于 PL 成正比)。(B): S:鞍区(位于鞍区的几何中心);Ba:椎底; S 0 :S-Ba 距离中点;Pm:翼上颌;ad 1 :Pm-Ba 线与咽扁桃体边界的交点;ad 2 :Pm-S 0 线与咽扁桃体边界的交点。(C): PHF:法兰克福水平面;Pt:翼突(圆孔下缘与翼腭窝后部交点处的点);PtV:垂直翼突(与 PHF 垂直于 Pt 的线);PtV-Ad:咽扁桃体边界与 PtV 之间的距离。(D): SP:上咽。

基于脑电图源信号的疲劳驾驶定向脑网络分析
摘要:疲劳驾驶是导致交通事故的重要因素之一,长期单调的驾驶易导致驾驶员注意力与警觉性下降,表现出疲劳效应。本文提出一种基于脑电图(EEG)源信号的有向脑网络角度揭示驾驶疲劳对大脑信息处理能力影响的方法。基于源分析得到的EEG信号电流源密度(CSD)数据,采用有向传递函数构建疲劳驾驶的有向脑网络。随着驾驶时间的增加,平均聚类系数和平均路径长度逐渐增加,而大部分节律的全局效率逐渐降低,表明深度驾驶疲劳增强了大脑局部信息的整合能力,同时削弱了大脑的整体能力。此外,因果流分析发现,清醒状态和驾驶疲劳状态下的电极分布存在明显差异,主要分布在前部和后部的几个区域,尤其是在θ节律下。研究还发现,在驾驶疲劳状态下,前部区域接收后部区域信息的能力明显变差。这些发现可能为揭示驾驶疲劳的潜在神经机制提供理论基础。

脑弥散 MRI 纤维束成像
图 10 重建的扣带束通路。上图显示穿过 ROI(显示为红色)的轨迹。中图显示在颞区放置额外的“AND”ROI(显示为白色)后剩余的通路。请注意,这样做后,额叶通路不再被选中(如问号所示)。类似地,在包含前部“AND”ROI(显示为白色)后,颞叶部分不再存在,如下图问号所示