XiaoMi-AI文件搜索系统
World File Search System动态建模
动态建模
在上一个单元中,您已经了解了GIS中空间建模的概念。您已被引入模型,其元素和类型,表面建模以及空间插值的作用和方法。您研究了各种类型的模型,例如数据模型,空间或过程模型,静态和动态模型等。在上一个单元中研究的重点是静态模型,该模型具有单向工作流,通常是特定时间点。因此,当我们希望随时间变化或将时间合并为另一个组件时,它们就会有局限性。也合并时间的模型被称为时空或动态模型。这种类型的模型具有其一定优势,但是,输出的准确性取决于输入数据的准确性和所使用的方法。任何输入数据中的任何错误都可能导致模型输出不正确。因此,错误及其影响需要仔细理解。在本单元中,您将了解GIS在时空建模中的使用以及错误传播及其影响。

电磁瞬态和动态建模与...
图 V.17:(a)两级二象限直流-直流斩波器(b)斩波器的子拓扑................................................................................................................................84
潜热热电池的动态建模
免责声明 本信息是根据美国政府机构资助的工作编写的。美国政府及其任何机构或其任何雇员均不对所披露的任何信息、设备、产品或流程的准确性、完整性或实用性做任何明示或暗示的保证,也不承担任何法律责任或义务,也不表示其使用不会侵犯私有权利。本文以商品名、商标、制造商或其他方式提及任何特定商业产品、流程或服务并不一定构成或暗示美国政府或其任何机构对其的认可、推荐或支持。本文表达的作者的观点和意见不一定代表或反映美国政府或其任何机构的观点和意见。

潜热热电池的动态建模
免责声明这一信息是作为由美国政府机构赞助的工作的帐户准备的。美国政府或其任何机构,或其任何雇员均未对任何信息,设备,产品或过程披露或代表其使用将不会侵犯私人拥有的私有权利。参考文献以商品名称,商标,制造商或其他方式指向任何特定的商业产品,流程或服务,并不一定构成或暗示其认可,建议或受到美国政府或其任何机构的支持。本文所表达的作者的观点和观点不一定陈述或反映美国政府或其任何机构的观点和意见。

Si(100)热氧化动态建模
自 20 世纪 50 年代以来,硅及其原生氧化物 SiO 2 就已用于半导体技术,并且对于当今新型器件技术的开发仍然至关重要。最近的理论和实验研究表明,制造高质量的界面层对于现代纳米级器件的可靠运行至关重要。本文提出了一种基于第一性原理的方法,从理论上评估 2 纳米以下超薄层范围内技术相关的 Si(100) 表面的热氧化过程。通过从头算分子动力学和基于密度泛函的紧密结合模拟动态模拟氧化过程。我们定性地解释了实验上众所周知但理解甚少的初始氧化阶段氧化速率下降,这是各种氧化机制之间的复杂相互作用,例如表面的快速 O 2 解离、由分子前体状态介导的较慢氧结合以及 O 2 通过氧化物的扩散。我们的模型结合了以前报告的实验见解,形成了 Si 氧化物生长的全面图像。发现氧化物表面层立即非晶化的有力证据,并确定这是晶格振动的直接结果。此外,我们的建模方法是一种基于晶体硅表面的逐步氧化来生成逼真的非晶界面结构的新方法,也可以扩展到其他材料系统。
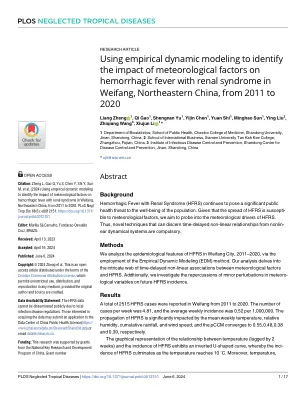
使用经验动态建模从2011年到2020
肾脏综合征(HFRS)出血热是由汉塔病毒引起的严重疾病,并由啮齿动物传播。气象因素(例如温度,潮湿,降水和风速)会影响HFRS的发生,扩散和爆发。然而,气候变化及其对疾病的影响之间的关系是复杂的,需要更多的研究为发展适应策略提供强大的科学基础。这项研究采用了一种称为经验动态建模(EDM)的新技术来研究Weifang气象因素与HFRS爆发之间的时间延迟的非线性关系。结果表明,气象因素可以以宏观和微观量表驱动HFRS的传播。温度(滞后2周)和HFRS发病率之间的关系表现出倒立U形曲线,发病率最高在10°C处。气象条件的变化,例如温度,相对湿度和降水的升高,可能会导致4-6个月后HFR的发病率升高。这项研究的结果对于公共卫生官员和政策制定者及时采取措施减轻气候变化对HFRS蔓延的影响至关重要。

基于冰的热量存储的动态建模...
摘要,热能存储(TES)单元的精确动态模型的开发对于它们在冷却系统中的有效操作很重要。本文提出了一个基于冰的TES储罐的一个维度离散的动态模型。简单性和可移植性是提出模型的关键属性,因为它们可以在任何编程语言中实现,从而有助于对复杂冷却系统的仿真和分析。该模型考虑了三个主要组成部分:能量平衡,特定热曲线的定义以及整体传热系数的计算。该模型的一个优点是它可以适用于采用相变材料的其他类型的TES单元。建模方法假定储罐中的流量和温度分布相等,并考虑了两个内管仅表示整个储罐,这显着减少了所需的方程数,从而减少了计算时间。在相变和传热液中的水的热物理特性被捕获。基于冰的TES储罐模型已在MATLAB/SIMULINK中实现。已经实现了模拟结果和文献中可用的实验数据之间的良好一致性,即对数学模型的有效性提供信心。

使用...对飞机表面进行动态建模和控制
滚转和偏航,以及飞机中这些状态的控制,是通过分别改变对升降舵、副翼和方向舵的指令信号来实现的。在本文中,我们仅考虑飞机的两种控制运动,即纵向和滚转运动。这两个控制面是用不同的智能控制器设计和实现的。飞机的这两种运动在飞行过程中很重要,在此期间飞机会从一种状态过渡到另一种状态。为了控制飞机的纵向和滚转运动,分别使用了一组称为升降舵和副翼的控制面。升降舵是位于固定翼飞机后部的可移动控制面,铰接在水平稳定器的后缘,与主翼平行运行,导致飞机旋转,导致飞机爬升和下降,并从机翼获得足够的升力,使飞机以各种速度保持平飞。升降舵是可移动的控制面,可以上下移动。如果升降舵向上旋转,则会减少尾部的升力,导致尾部降低而机头抬高。如果升降舵向下旋转,则会增加尾部的升力,导致尾部抬高而机头降低。降低飞机机头会增加前进速度,而抬高机头会降低前进速度 [1]。