XiaoMi-AI文件搜索系统
World File Search System半球形

在两个相同半球形表面均匀表面电荷密度
从几何学的角度来看,一个球体通过其中心围绕任何轴的旋转对称性,并通过其center横穿任何平面上的对称对称性。具有这些特性的任何系统都被认为是球体对称的。例如,实体球和球形壳是球体对称的。现在让我们假设某种电荷包含在球体对称体中,以使给定点的密度不取决于方向。例如,假设球形表面均匀地充满了恒定的表面电荷密度或固体球体包含恒定体积电荷密度1的电荷1。这是带有球形符号的电荷分布的方案。然而,如果相同的球形表面充电,以使“北部”半球表面的表面电荷密度均匀,σ1则其“南部”反应具有不同的值,σ22 =σ1,该系统缺乏球形对称性。由球形表面的另一个例子是表面电荷密度取决于极性共同位置的标准案例研究,该标准案例研究是由于球体2外的点电荷存在,因此在接地球上诱导的表面电荷密度。此问题很好地说明了图像方法的应用。如果电荷分布具有球形对称性,则其电场必须具有球形对称性,并且是拨动向量。球形符号的第二个影响是,电场的大小仅取决于距分布中心的距离。结果,具有原点的球形坐标系统对对称中心的反应非常适合以一种相当简单的方式在任意点上计算电场。例如,可以使用3-7文献中广泛使用的许多此类结果所示的高斯定律。在球形坐标中,可以写入体积电荷密度为ρ(r,θ,φ)和

半球形壳形有机光伏细胞,可增强吸收和改善的角度覆盖
摘要。为有机光伏细胞结构提出了半球形壳形状,旨在增强光吸收和角度覆盖。三维有限元分析方法用于研究半球形壳形活性层中的吸收光谱。研究表明,与扁平结构化的设备相比,当传入光是横向电动(TE)和横向磁性(TM)极偏振时,所提出的结构可能会导致66%和36%的吸收改善。与先前报道的半微粒壳结构相比,所提出的半球形壳结构的吸收改善高达13%(TE)和21%(TM)。也提高了所提出的结构的角度覆盖范围,达到81度(TE)和82度(TM),这对于可穿戴的电子应用非常有用,在这些应用中,入射角可以随机变化。这些改进可以归因于更好的光耦合和通过设备半球形外壳形状使活跃层引导。

翼展方向振荡半球形炮塔下游尾流响应 Aaron Roeder 1 , Stanislav Gordeyev 2 圣母大学,圣母大学,我
本文介绍了亚音速下振荡半球形炮塔下游尾流响应的实验研究。振荡炮塔由安装在铝制矩形板上的炮塔外壳组成。炮塔组件设计为使炮塔以单一频率沿翼展方向振荡,与主要尾流模式的主频率一致。流体的基于共振的气动弹性响应导致炮塔沿翼展方向受迫振荡。安装在炮塔组件不同位置的多个加速度计用于测量局部位移。结果表明,炮塔以固定频率振荡,振荡频率范围为 0.3 至 0.55 马赫数,振荡幅度约为 1 毫米。在炮塔下游的隧道壁上放置了几个非稳定压力传感器,用于研究振荡炮塔的尾流响应。研究发现,与固定炮塔下游的尾流相比,振荡炮塔的压力波动能量较小,尾流在翼展方向上更加有序。

超声波加工 (USM)
• 磨料颗粒为球形 • 磨料颗粒刚性且坚硬 • 所有磨料颗粒都类似 • 所有冲击都相同 • 忽略由于空化和化学侵蚀而导致的材料去除 • 每次冲击去除的材料为半球形 • MRR 与磨料颗粒的频率和数量成正比

航空铝合金 7075-T6 的超声波和常规疲劳耐久性,具有人工和诱导预腐蚀
摘要:对 AISI-SAE AA7075-T6 铝合金进行了超声波和常规疲劳试验,以评估人工和诱导预腐蚀的效果。人工预腐蚀是通过在试样颈部沿试验试样的纵向或横向加工两个直径为 500 µ m 的半球形点蚀孔获得的。诱导预腐蚀是使用欧洲航天局的国际标准 ESA ECSS-Q-ST-70-37C 实现的。试样采用频率为 20 kHz 的超声波疲劳技术进行测试,采用频率为 20 Hz 的常规疲劳进行测试。两个施加的载荷比为:超声波疲劳试验中 R = − 1,常规疲劳试验中 R = 0.1。主要结果为人工和诱导预腐蚀对疲劳耐久性的影响,以及常规疲劳试验后的表面粗糙度变化。分析了裂纹萌生和扩展,并建立了数值模型来研究与预腐蚀坑相关的应力集中,以及从裂纹萌生到断裂的 I 型应力强度因子的评估。最后,获得了基材和横向有两个半球形坑的试样的应力强度因子范围阈值 ∆ K TH。


金属腐蚀:因素、类型和预防策略
点蚀是局部腐蚀的一种重要形式,它始于材料上的一小块区域,并逐渐扩展,在表面形成难以察觉的较深凹坑 [1]。在此过程中会形成半球形或杯形的凹坑或孔洞 [16],被杂质或水覆盖的区域作为阳极,未被覆盖的区域作为阴极。在这种腐蚀类型中,金属的溶解被认为是由电化学机制控制的 [17]。不锈钢、铝和铁极易发生点蚀,这是一种特别危险的腐蚀形式 [1]。尽管不锈钢通常具有耐腐蚀性(含有铬和镍 [18-22]),但由于其保护性氧化膜受到局部侵蚀,不锈钢等材料仍会发生点蚀 [1]。

Sigma-1受体
我们提出了一个血浆传感器(三合一),用于测量不同的蔗糖浓度。由于折射率随浓度而变化很小,因此我们设计了一个三合一的传感器,以覆盖从0-80%的Brix度量覆盖所有浓度。提出的传感器通过折射率(低,中和高)范围运行。它们由kretschmann配置后的半球形棱镜和一层金组成。在低区域工作的传感器的灵敏度在22.95至4.64riu -1之间,分辨率在4.3x10 -4至8.7 x10 -5 riU之间,用于中区域的敏感性在4.3x10 -4至8.7 x10 -5 riU之间的敏感性在21.05到21.05至3.89riu -1之间,并且在5.1x10 -4和9.4.4和9.5x10 -5 riU之间的敏感性之间。在19.60到4.64riu -1之间,分辨率为4.3x10-
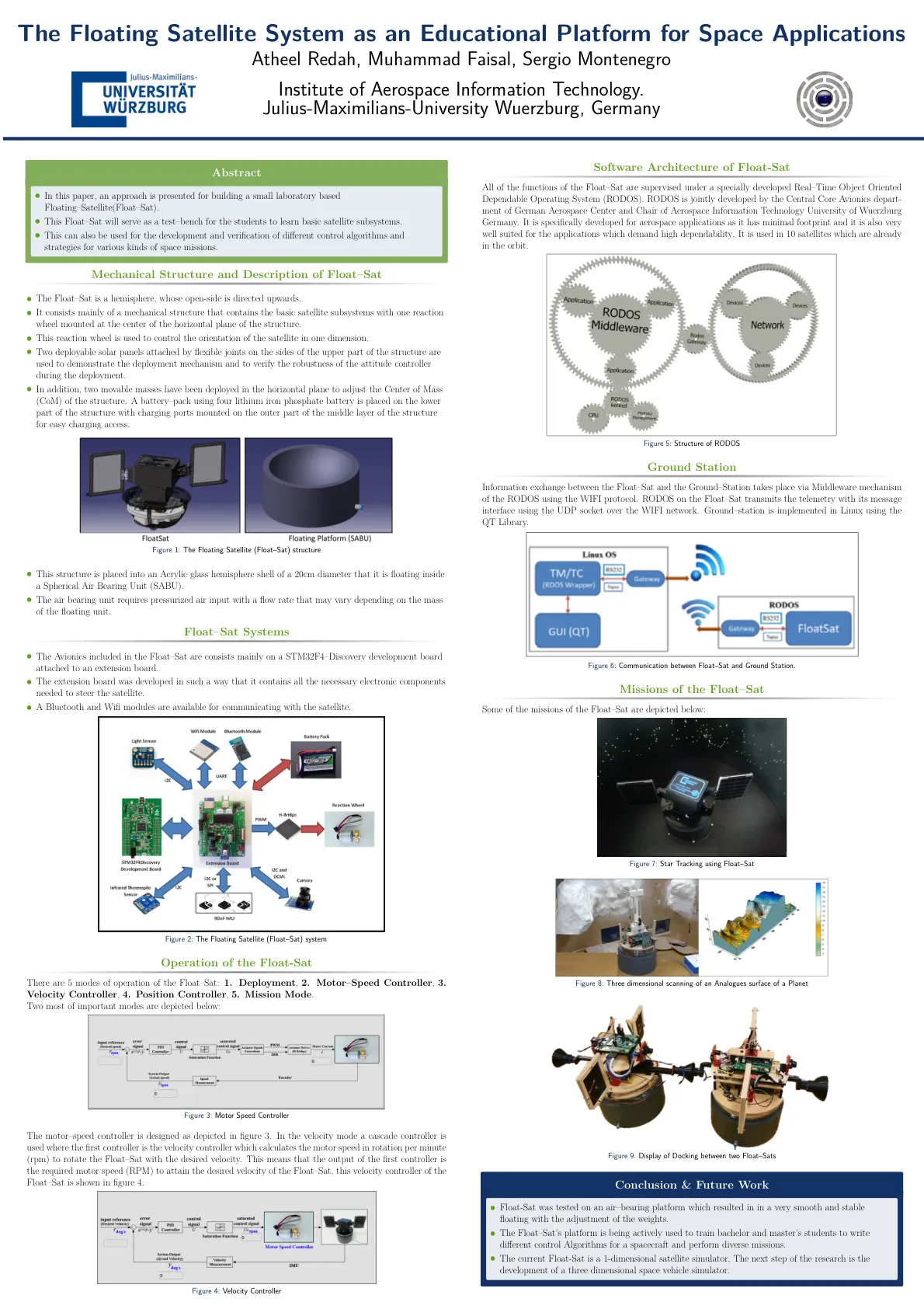
浮动卫星系统作为太空应用教育平台
• Float–Sat 是一个半球形,其开口面朝上。• 它主要由一个机械结构组成,该结构包含基本的卫星子系统,一个反作用轮安装在结构水平面的中心。• 该反作用轮用于在一个维度上控制卫星的方向。• 两个可展开的太阳能电池板通过柔性接头固定在结构上部两侧,用于演示展开机制并验证姿态控制器在展开过程中的稳健性。• 此外,两个可移动质量已在水平面上部署,以调整结构的质心 (CoM)。使用四个磷酸铁锂电池的电池组放置在结构的下部,充电端口安装在结构中间层的外侧,方便充电。