XiaoMi-AI文件搜索系统
World File Search System卡尔曼

发现卡尔曼滤波器作为实用工具...
最初使用扰动方法的研究和上面提到的滤波器分解都是基于对标称(参考)轨迹的线性化,但很快就发现,对当前估计状态的重新线性化可能比以前使用的技术具有显著的优势。
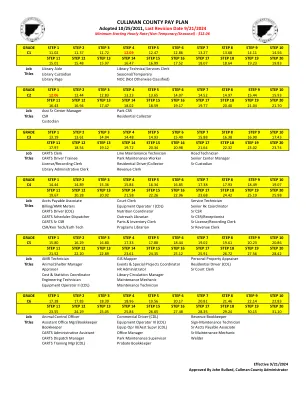
卡尔曼县支付计划
等级 步骤 1 步骤 2 步骤 3 步骤 4 步骤 5 步骤 6 步骤 7 步骤 8 步骤 9 步骤 10 C7 18.91 19.51 20.12 20.75 21.40 22.07 22.77 23.48 24.22 24.98 步骤 11 步骤 12 步骤 13 步骤 14 步骤 15 步骤 16 步骤 17 步骤 18 步骤 19 步骤 20 25.77 26.57 27.41 28.27 29.16 30.07 31.02 31.99 33.00 34.03 职位 行政助理/办公室经理 EMA 专家 项目协调员 职称 助理图书馆馆长 工程助理 道路施工队队长 (CDL) 助理系统操作员 政府税务分析师 固体废物官员 桥梁建设技术员 (CDL)库存/采购代理 高级估价师 桥梁建设技术员/助理主管 (CDL) 营销/活动协调员 高级 GIS 测绘员 区域管理协调员 机械师-车库 高级个人道具估价师 选举协调员 办公室和零件采购经理
Wasserstein 分布稳健卡尔曼滤波
H ∞ 滤波器针对的是噪声过程统计数据不确定的情况,此时我们的目标是最小化最坏情况而不是估计误差的方差 [ 3 , 26 ]。该滤波器限制了将扰动映射到估计误差的传递函数的 H ∞ 范数。然而,在瞬态操作中,会失去所需的 H ∞ 性能,并且滤波器可能会发散,除非每次迭代中都有一些(通常是限制性的)正性条件成立。在集值估计中,扰动向量通过有界集(如椭球)建模 [ 4 , 22 ]。在该框架中,我们试图围绕与观测值和外生扰动椭球一致的状态估计构建最小椭球。然而,由此产生的稳健滤波器会忽略任何分布信息,因此倾向于过于保守。 [19] 首次研究了一种对更一般形式的(基于集合的)模型不确定性具有鲁棒性的滤波器。该滤波器以迭代方式最小化标准状态空间模型附近所有模型的最坏情况均方误差。虽然该滤波器在面对较大不确定性时表现良好,但在较小不确定性下可能过于保守。[25] 提出了一种广义卡尔曼滤波器,它可以解决这个缺点,在标准性能和最坏情况性能之间取得平衡。通过最小化矩生成函数而不是估计误差平方的均值,可以得到风险敏感的卡尔曼滤波器 [24]。这种风险敏感的卡尔曼滤波器等同于 [12] 中提出的分布鲁棒滤波器,它最小化标准分布周围的 Kullback-Leibler (KL) 球中所有联合状态-输出分布的最坏情况均方误差。 [27] 研究了更一般的 τ -散度球的扩展。


电池管理系统的扩展卡尔曼过滤...
混合电动车辆电池组中的电池管理系统必须估算该包目前的工作状况的值。其中包括:电池最新电池,电力褪色,容量褪色和瞬时功率。估计机制必须随着细胞的年龄而适应细胞特征的变化,因此在包装的寿命中提供了准确的估计值。在一系列三篇论文中,我们提出了基于扩展的卡尔曼过滤(EKF)的方法,这些方法能够实现锂离子聚合物电池组的这些目标。我们希望它们也将在其他电池化学上运作良好。这些论文涵盖了所需的数学背景,细胞建模和系统识别要求以及最终解决方案以及结果。第三篇论文结束了该系列的结论,其中列出了五个其他应用,在典型的BMS算法中可以使用EKF或EKF的结果:在车辆闲置之后的初始化状态估计值一段时间后的初始化;在估计值中估算具有动态误差界限的最新电荷;估计包装包/充电功率;跟踪更改包装参数(包括功率褪色和容量褪色)作为包装年龄,因此提供了对最新健康状况的定量估计;并确定必须均等的细胞。提出了包装测试的结果。©2004 Elsevier B.V.保留所有权利。
卡尔曼滤波器组在飞机发动机中的应用...
卡尔曼滤波器组在飞机发动机故障诊断中的应用 Takahisa Kobayashi QSS Group, Inc. 俄亥俄州克利夫兰 44135 电子邮件:Takahisa.Kobayashi@grc.nasa.gov Donald L. Simon 美国陆军研究实验室 格伦研究中心 俄亥俄州克利夫兰 44135 电子邮件:Donald.L.Simon@grc.nasa.gov 摘要 本文将卡尔曼滤波器组应用于飞机燃气涡轮发动机传感器和执行器故障检测和隔离 (FDI) 以及组件故障检测。这种方法使用多个卡尔曼滤波器,每个滤波器都用于检测特定的传感器或执行器故障。如果确实发生故障,除使用正确假设的滤波器之外的所有滤波器都会产生较大的估计误差,从而隔离特定故障。同时,估计了一组指示发动机部件性能的参数,以检测突然退化。将所提出的 FDI 方法应用于标称和老化条件下的非线性发动机仿真,并给出了巡航运行条件下各种发动机故障的评估结果。证明了所提出的方法能够可靠地检测和隔离传感器和执行器故障。术语 A16 可变旁通管道面积 A8 喷嘴面积 BST 增压器 CLM 组件级模型 FAN 风扇 FDI 故障检测和隔离 FOD 异物损坏 HPC 高压压缩机 HPT 高压涡轮 LPT 低压涡轮 P27 HPC 入口压力 PS15 旁通管道静压 PS3 燃烧室入口静压 PS56 LPT 出口静压 T27D 增压器入口温度 T56 LPT 出口温度

扩展卡尔曼滤波器设计及船舶运动预测...
摘要 — 本文使用来自自动识别系统 (AIS) 的实时数据和扩展卡尔曼滤波器 (EKF) 设计来解决船舶运动估计问题。AIS 数据从全球船舶传输,甚高频 (VHF) AIS 接收器以美国国家海洋电子协会 (NMEA) 指定的格式接收信号作为编码的 ASCII 字符。因此,必须使用解析器解码 AIS 语句以获得实时船舶位置、航向和速度测量值。状态估计用于碰撞检测和实时可视化,这是现代决策支持系统的重要特征。使用来自挪威特隆赫姆港的实时 AIS 数据验证了 EKF,并证明估计器可以实时跟踪船舶。还证明了 EKF 可以预测船舶的未来运动,并在防撞场景中分析了不同的规避动作。索引术语 — 卡尔曼滤波器、状态估计、运动预测、碰撞检测、无人水面航行器、船舶

使用卡尔曼过滤器对电池电池进行性能分析
摘要。锂离子(锂离子)电池在电动汽车的性能中起着至关重要的作用,这是由于其独特的特性和紧凑的尺寸。为了确保这些电池的寿命延长,用户必须采取其他预防措施。受多种道路条件影响的永久磁铁同步电动机(PMSM)驱动器应用的可变负载扭矩增加了情况。鉴于电动汽车运行(EVS)涉及的众多电气传感器和机械组件,评估锂离子电池的充电状态(SOC)被证明是一个重大挑战。在这种情况下,SOC可能会受到嘈杂的测量,导致电池随着时间的推移的性能下降。本文提议利用Kalman过滤器从嘈杂的测量结果估算实际SOC,依靠间接测量作为提高准确性的基础。