XiaoMi-AI文件搜索系统
World File Search System原点

基于速率的无人机控制与自适应原点更新...
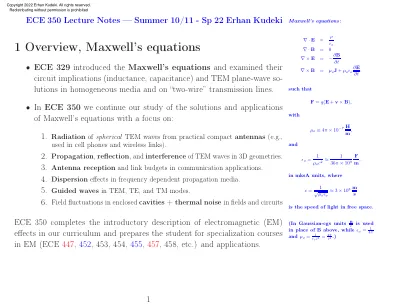
一种新的远程存在形式是通过用无人驾驶飞行器 (UAV) 上的摄像机录制视频并通过头戴式显示器 (HMD) 向用户播放视频来实现的。这里的一个关键问题是如何让用户自由自然地控制无人机,从而控制视点。在本文中,我们开发了一种基于 HMD 的远程存在技术,可实现视点的完全 6 自由度控制。我们技术的核心是一种改进的基于速率的控制技术,采用我们的自适应原点更新 (AOU),其中用户的坐标系原点会自适应地变化。这使得用户自然地感知原点,从而轻松执行控制动作以获得他/她想要的视点变化。因此,无需任何辅助设备的帮助,AOU 方案就可以处理基于速率的控制方法中众所周知的自定心问题。我们还构建了一个真实的原型来评估我们技术的这一特性。为了探索我们的远程存在技术的优势,我们进一步将其用作交互式工具来执行 3D 场景重建任务。用户研究表明,与其他远程存在解决方案和广泛使用的基于操纵杆的解决方案相比,我们的解决方案大大减少了用户的工作量并节省了时间和移动距离。

从颗粒流变学到太空 3D 打印——再回到原点
A. Zocca、J. Lüchtenborg、T. Mühler、J. Wilbig、G. Mohr、T. Villatte、F. Léonard、G. Nolze、M. Sparenberg、J. Melcher、K. Hilgenberg 和 J. Günster,“在微重力环境下实现金属部件的 3D 打印”,Advanced Materials Technologies 4,1900506 (2019)。J. Günster、A. Zocca、CM Gomes 和 T. Muehler,“利用真空稳定增材制造粉末床的方法”,美国专利 9533452B2 (BAM,2017)。

物理 51 期中考试样本 #1 (23 分) 作者:Todd Sauke 问题 #1。一个点电荷 Q = -800 nC(纳库仑)和两个未知点电荷,
物理 51 期中考试样本 #1 (23 分) 由 Todd Sauke 提出 问题 #1。点电荷 Q = -800 nC(纳库仑)和两个未知点电荷 q 1 和 q 2 的放置位置如右图所示。由于电荷 Q、q 1 和 q 2 ,原点 O 处的电场等于零。我们要确定电荷 q 1 和 q 2 的值。原点处的电场矢量有两个分量(x 和 y)。由于原点处的电场为零,所以 x 和 y 分量都为零。我们可以分别考虑 x 和 y 分量。请记住,由于 q 1 引起的原点处电场的 y 分量为零,因为它在 x 轴上。由于电荷 Q 引起的原点处 E 场的 y 分量是多少?(使用三角函数求得 y 分量。)

第 11 课 经济学 第 2 章
(ii) 它凹向原点。为什么 PPC 向下倾斜这是因为在资源给定的情况下,只有当商品 1 的产量减少时,商品 2 的产量才有可能增加PPC 凹向原点的原因PPC 凹向原点是因为边际机会成本的增加。这是因为为了将一种商品的产量增加 1 单位,就必须牺牲越来越多的另一种商品单位,因为资源是有限的,并且两种商品的生产效率并不相同。机会成本 - 当选择一种替代方案时,其他替代方案的损失。边际机会成本 - 它分析生产额外产品单位对企业成本的影响以及公司为生产更多产品而放弃的机会。

公共事务 856 全球经济中的贸易、竞争和治理 讲座 20-21 2020 年 4 月 6 日至 8 日
本国工资在点 A 处确定,即制造业和农业的边际劳动曲线 PM • MPL M 和 PA • MPL A 的交点。制造业使用的劳动量从原点 0 M 开始从左到右测量,农业使用的劳动量从原点 0 A 开始从右到左测量。在点 A 处,制造业使用 0 ML 单位劳动,农业使用 0 AL 单位劳动。

2az,找到:a)方向上的单位向量 - ElCoM
c) 在 D 处指向原点的单位向量:从 r D = ( − 1 , − 4 , 2) 开始,因此指向原点的向量为 − r D = (1 , 4 , − 2)。因此,在笛卡尔坐标系中,单位向量为 a = (0 . 22 , 0 . 87 , − 0 . 44)。转换为圆柱坐标系:a ρ = (0 . 22 , 0 . 87 , − 0 . 44) · a ρ = 0 . 22 cos( − 104 . 0) + 0 . 87 sin( − 104 . 0) = − 0 . 90,以及 a φ = (0 . 22 , 0 . 87 , − 0 . 44) · a φ = 0 . 22[ − sin( − 104 . 0)] + 0 . 87 cos( − 104 . 0) = 0,因此最终 a = − 0 . 90 a ρ − 0 . 44 az .


主题 9 一般均衡与市场效率
主题 9 经济学 203 第 6 页 高度对应于每个时间段可用的食物总量:100 单位。其宽度等于衣服总量:200 单位。OA 是个人 1 的原点。左侧和底部是测量其食物和衣服数量的轴。OB 是个人 2 的原点。从 OB 向左移动对应于衣服数量的增加。从 OB 向下移动对应于食物的增加。由于矩形的构造方式,位于其中的每个点都对应于恰好耗尽可用食物和衣服总量的分配。