XiaoMi-AI文件搜索系统
World File Search System双足体
双靶向纳米反应器和前体药物
将纳米反应器和前药相结合的协同策略在抗癌治疗中具有巨大潜力。然而,由于缺乏复杂的癌症靶向策略,精确杀死目标癌细胞仍然是一个重大挑战。这里报道了一种双靶向方法,该方法结合了产生 H 2 O 2 的叶酸受体靶向纳米反应器和环氧合酶-2 (COX-2) 靶向前药的作用。制备了一种封装葡萄糖氧化酶 (GOX) 的叶酸修饰二氧化硅纳米反应器以产生 H 2 O 2,其诱导氧化应激并允许通过靶向细胞内递送激活前药。提出了一种新型前药,其同时带有 COX-2 靶向塞来昔布和 SN-38 抗癌剂以及可由 H 2 O 2 裂解的硫缩酮连接体以激活药物。通过双重靶向,GOX 产生的 H 2 O 2 可触发前药中硫缩酮连接体的裂解,从而在癌细胞中产生 SN-38 抗癌药物的活性形式,诱导协同细胞死亡。这种具有协同效力的双重靶向策略有助于开发选择性和有效的抗癌疗法。
翠鸟柔性自动隔离病毒DNA/RNA的方案| neb
将打靶特定人源基因的 Cas9 和 sgRNA 转染到 HEK293 细胞。转染所用的质粒 DNA 上含有 表达带双端核定位序列 ( NLS )的 Cas9 及 sgRNA 的表达框,通过 TransIT-X2 (Mirus) 转染 试剂进行转染。转染所用的 Cas9 mRNA 进行了假尿苷和 5- 甲基胞嘧啶修饰且带有双端 核定位序列,使用 transIT-mRNA 转染试剂将 sgRNA 和 mRNA 共转染。 Cas9 RNPs 使用脂质 体 RNAiMAX ( Life Technologies ) 进行反向转染, RNP 的终浓度为 10 nmol 。 Cas9 蛋白上不含 核定位序列。 EnGen Cas9 含有双端核定位序列。编辑效率通过 T7E1 实验进行分析,结果 以修饰百分比进行统计。
基因编辑
将打靶特定人源基因的 Cas9 和 sgRNA 转染到 HEK293 细胞。转染所用的质粒 DNA 上含有 表达带双端核定位序列 ( NLS )的 Cas9 及 sgRNA 的表达框,通过 TransIT-X2 (Mirus) 转染 试剂进行转染。转染所用的 Cas9 mRNA 进行了假尿苷和 5- 甲基胞嘧啶修饰且带有双端 核定位序列,使用 transIT-mRNA 转染试剂将 sgRNA 和 mRNA 共转染。 Cas9 RNPs 使用脂质 体 RNAiMAX ( Life Technologies ) 进行反向转染, RNP 的终浓度为 10 nmol 。 Cas9 蛋白上不含 核定位序列。 EnGen Cas9 含有双端核定位序列。编辑效率通过 T7E1 实验进行分析,结果 以修饰百分比进行统计。
基因编辑
将打靶特定人源基因的 Cas9 和 sgRNA 转染到 HEK293 细胞。转染所用的质粒 DNA 上含有 表达带双端核定位序列 ( NLS )的 Cas9 及 sgRNA 的表达框,通过 TransIT-X2 (Mirus) 转染 试剂进行转染。转染所用的 Cas9 mRNA 进行了假尿苷和 5- 甲基胞嘧啶修饰且带有双端 核定位序列,使用 transIT-mRNA 转染试剂将 sgRNA 和 mRNA 共转染。 Cas9 RNPs 使用脂质 体 RNAiMAX ( Life Technologies ) 进行反向转染, RNP 的终浓度为 10 nmol 。 Cas9 蛋白上不含 核定位序列。 EnGen Cas9 含有双端核定位序列。编辑效率通过 T7E1 实验进行分析,结果 以修饰百分比进行统计。

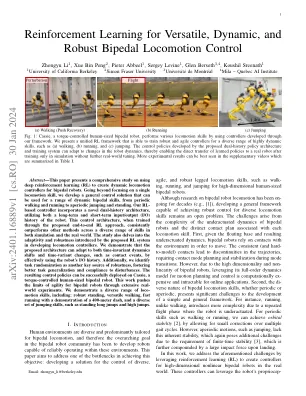
用于多功能,动态和鲁棒的双体运动控制
摘要 - 本文介绍了一项有关使用深钢筋学习(RL)为双皮亚机器人创建动态运动控制器的综合研究。超越了关注单个运动技能的关注,我们开发了一种通用控制解决方案,该解决方案可用于一系列动态的两足动物技能,从定期步行和跑步到Aperiodic的跳跃和站立。我们的基于RL的控制器结合了一种新颖的双历史结构,利用了机器人的长期和短期输入/输出(I/O)历史记录。通过拟议的端到端RL方法进行培训时,这种控制架构始终优于模拟和现实世界中各种技能的其他方法。该研究还深入研究了拟议的RL系统在开发运动控制器时引入的适应性和鲁棒性。我们证明,提出的体系结构可以通过有效使用机器人的I/O历史记录来适应时间不变的动态变化和时间变化的变化,例如接触事件。此外,我们将任务随机化确定为鲁棒性的另一个关键来源,促进了更好的任务概括和对干扰的依从性。可以成功部署所得控制的控制策略,这是一种扭矩控制的人尺寸的两头机器人。这项工作通过广泛的现实世界实验推动了双皮亚机器人的敏捷性限制。我们展示了各种各样的运动技能,包括:坚固的站立,多功能步行,快速跑步,展示了400米仪表板,以及各种各样的跳跃技能,例如站立的跳远和跳高。
体超导铟对一维锌超导纳米线超导电性的抑制效应'
(!“#$”%&'%()#'*+),“ - +。“#+”)#/ 0“ 1)%$ 2”#$'&345*。+*,3“ ##*5,6)#。) div>- $)$“ 7#.6”%*。
双硫仑抑制足细胞焦亡治疗膜性肾病
摘要 简介:膜性肾病 (MN) 是一种常见的成人慢性肾脏疾病,也是临床治疗的主要挑战。尽管自发现磷脂酶 A2 受体是 MN 足细胞的主要自身抗原以来取得了重大进展,但导致肾小球损伤的机制仍然难以捉摸。我们最近的研究发现,细胞焦亡是一种新发现的程序性坏死性细胞死亡,主要由 gasdermin 介导,是造成 MN 足细胞损伤的原因。目的:本研究旨在探索 FDA 批准的药物双硫仑 (DSF) 通过抑制细胞焦亡在 MN 治疗中的治疗效果。方法与结果:DSF 显著减轻了 C3a/C5a 诱导的体外足细胞损伤和被动性 Heymann 肾炎 (PHN) 大鼠的肾脏病变,表现为碘化丙啶染色足细胞百分比降低、培养足细胞乳酸脱氢酶释放减少,24 小时尿蛋白、血清白蛋白、血清肌酐、异常

大脑-身体任务共同适应可以提高自主学习和双足行走的速度
摘要 受到动物大脑和身体共同适应环境的启发,我们提出了一种肌腱驱动和过度驱动(即 n 个关节、n + 1 个执行器)的双足机器人,它 (i) 利用其可反向驱动的机械特性来管理身体与环境的相互作用,而无需明确控制,以及 (ii) 使用简单的 3 层神经网络在仅 2 分钟的“自然”运动喋喋不休(即与腿部和任务动态兼容的探索策略;类似于儿童游戏)后即可学会走路。这种大脑与身体的协作首先学会在“空中”产生脚的周期性运动,并且无需进一步调整,就可以在双足动物放低到与地面轻微接触时产生运动。相比之下,用 2 分钟的“幼稚”运动喋喋不休(即忽略腿部任务动态的探索策略)进行训练,不会在“空中”产生一致的周期性运动,并且在与地面轻微接触时会产生不稳定的运动并且没有运动。当进一步降低双足动物并使期望的腿部轨迹达到地面以下 1 厘米时(导致期望轨迹与实际轨迹之间的误差不可避免),基于自然或幼稚的咿呀学语的周期性运动呈现出几乎同样持续的趋势,并且随着幼稚的咿呀学语而出现运动。因此,我们展示了如何通过植根于植物可反向驱动特性的持续物理适应来驱动在不可预见的情况下不断学习行走,并通过利用植物动力学的探索策略来增强这种适应。我们的研究还表明,受生物启发的肢体和控制策略的共同设计和共同适应可以在没有明确控制轨迹误差的情况下产生运动。