XiaoMi-AI文件搜索系统
World File Search System响应速度
机器学习和人工智能在应对当今公用事业挑战中的力量
Business Wire 援引 IDC 的一份报告预测,“采用人工智能的企业对客户、竞争对手、监管机构和合作伙伴的响应速度将比同行快 50%。”人工智能和机器学习使公用事业部门的企业能够应对难以预测的天气事件,并启动快速、有针对性的响应。具有人工智能功能的解决方案可提供洞察力,帮助公用事业提供商缩短响应时间、恢复和获取资源。

H6c Pro 4K_数据表
最新的 H6c Pro 让您的室内安防更轻松、更智能、更省心。这款摄像机可自动旋转,使用 4K 镜头覆盖更多细节,确保不会遗漏任何细节。这款摄像机对人体动作和噪音的响应速度无与伦比,在自动化方面又迈进了一大步。除了先进的安防功能外,它还创新性地引入了触摸呼叫按钮,让您与家人保持联系。

制造1D TE/2D RES2混合
摘要:二维(2D)rhenium disulfer(RES 2)的优质光学和电子特性使其适用于纳米电子和光电子应用。然而,内部缺陷以及Res 2的低迁移率和吸收能力阻碍了其在高性能光电探测器中的利用。制造混合型杂界是设计高性能混合光电探测器的替代方法。本研究提出了一个混合维范德华(VDW)杂音杂音光电探测器,其中包含高性能的一维(1D)P-Type Thilurium(TE)和2D N-Type Res 2,使用Dry Cression使用Dry Cransel Mage在Res 2 Nano-lope上沉积在Res 2 nano inanowires上而开发的。由于在RES 2和TE界面形成的II型P -n异质结,它可以改善光激发电子 - 孔对的注入和分离效率。提出的异质结构设备对可见光灵敏度(632 nm)敏感,具有超快的光响应(5 ms)(5 ms),高响应性(180 a/w)和特定的检测率(10 9),其优于Pristine te和Res 2 PhotododeTectors。与RES 2设备相比,响应速度和响应速度通过数量级更好。这些结果证明了TE/RES 2混合差异的制造和应用潜力,用于高性能光电设备和传感器。关键字:光电探测器,可见光,光响应率,Res 2纳米环,TE纳米线,范德华瓦尔斯异质结

材料进步-RSC出版
灵活的光电探测器最近由于其广泛的应用,包括运动检测,光学通信,传感,生物医学成像和导弹警告,因此引起了更多关注。1,2这种灵活的光电探测器的最佳设计中的关键要求是功耗。高度希望开发没有外部功率输入的FSPD,这可以明显地提高适应性并降低柔性光电探测器的成本。3–8 SPD可以分为两类。9第一个是通过光伏效应构建的。10第二个设计的是集成的纳米系统,其中包括能量收集或存储单元以及光传感器。11,第一类无维护功能和简化结构在第二类中具有低成本优势。由于其独特的电气和光电特性,金属硫化剂半导体是光电设备的有趣选择。12硫化镉(CDS)是一种具有快速响应,低工作功能,高光敏性,较大的折射率和异常的化学和热稳定性的物理化学有趣的中间带直接带(2.4 eV)半核。因此,它是自助光电探测器的引人入胜且潜在的候选者。13–23,例如,Dai等人。 报道了由p-Si/n-CDS纳米线结构组成的FPSD,它们的响应超出了带镜头的限制,并在零时快速响应速度13–23,例如,Dai等人。报道了由p-Si/n-CDS纳米线结构组成的FPSD,它们的响应超出了带镜头的限制,并在零时快速响应速度
2024欺诈主题评论-EN
与识别和评估存在的欺诈风险因素相关的一些检查结果。这表明审计师可能没有足够且适当的培训,背景或专业资源来协助欺诈风险评估,并将适当的响应速度程序作为整体审计参与的一部分。需要参与伙伴,以确保参与团队的成员共同具有适当的能力和能力,包括足够的时间来执行参与。考虑到参与的性质和情况,需要作为计划的一部分做出此决定,但也必须重新评估参与过程中可能发生的任何更改。
用于检测网络攻击的人工智能蜜罐系统
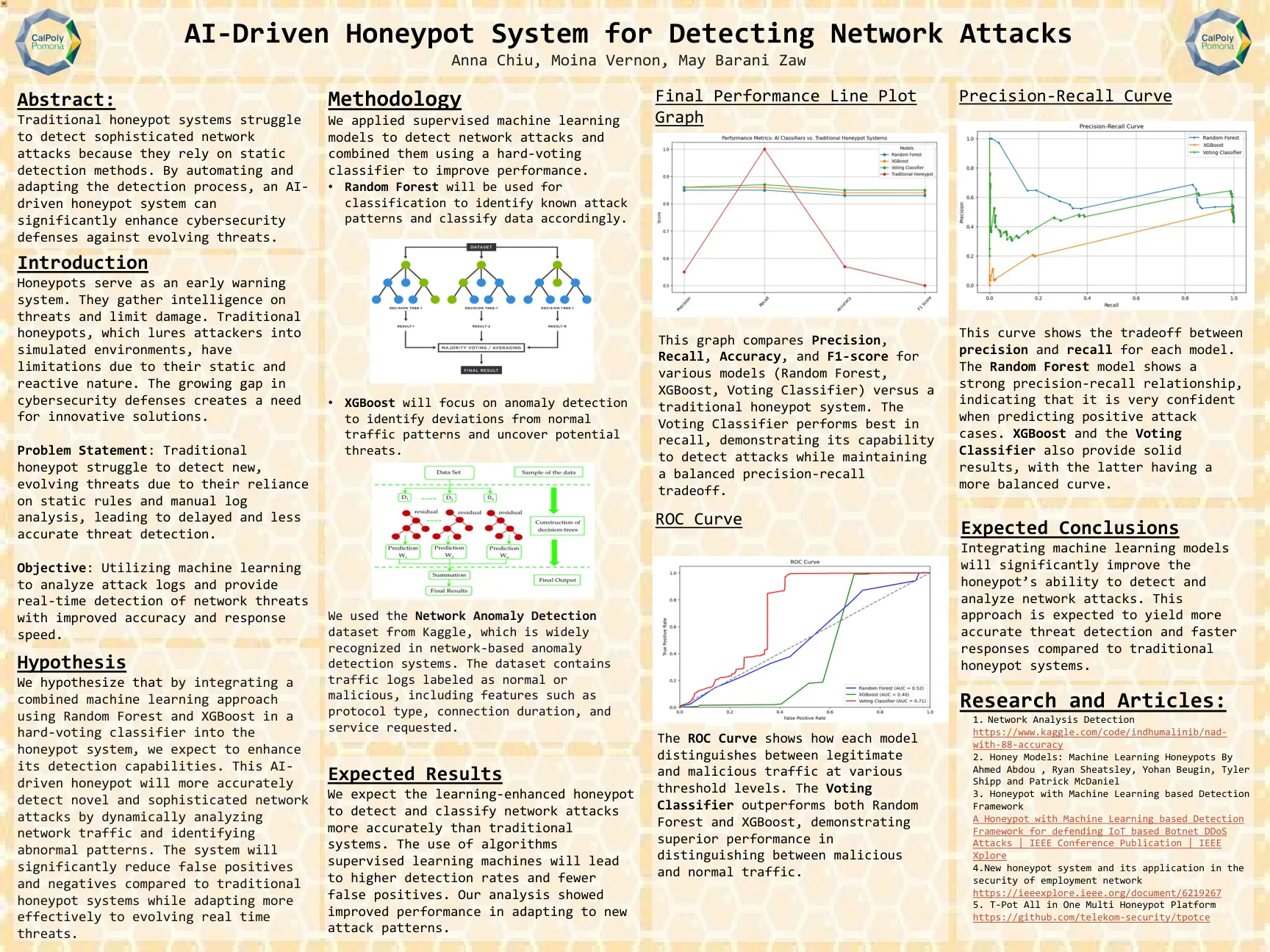
目标:利用机器学习分析攻击日志,实时检测网络威胁,提高准确性和响应速度。假设:我们假设,通过在硬投票分类器中集成使用随机森林和XGBoost的组合机器学习方法,将蜜罐系统集成到系统中,我们期望能够增强其检测能力。这种人工智能驱动的蜜罐将通过动态分析网络流量并识别异常模式,更准确地检测新型复杂的网络攻击。与传统蜜罐系统相比,该系统将显著减少误报和漏报,同时更有效地适应不断变化的实时威胁。

更快地发现更好的设计 - Siemens PLM
因此,海洋工业面临着一项艰巨的任务:生产比以往更多的船舶(更多船舶、更大容量),同时大幅减少对环境的影响(减少排放、提高效率)。传统的“设计-测试-建造”方法,即使用简化的势流模拟工具设计船体,并在拖曳水池中使用缩放的物理模型进行测试,其响应速度和准确性不足以实现实现长期环境目标所需的性能改进。这些方法也无法准确预测船舶在实际操作条件下的表现,例如在波涛汹涌的大海中进行自航操纵。
更快地发现更好的设计 - Siemens PLM
因此,海洋工业面临着一项艰巨的任务:生产比以往更多的船舶(更多船舶、更大容量),同时大幅减少对环境的影响(减少排放、提高效率)。传统的“设计-测试-建造”方法,即使用简化的势流模拟工具设计船体,并使用拖曳水池中的缩放物理模型进行测试,其响应速度和准确性不足以提供满足长期环境目标所需的性能改进。这些方法也无法准确预测船舶在真实操作条件下的表现,例如在波涛汹涌的大海中进行自行推进操作。