XiaoMi-AI文件搜索系统
World File Search System回收器
如何使用 MDB-RS232® 测试回收站...
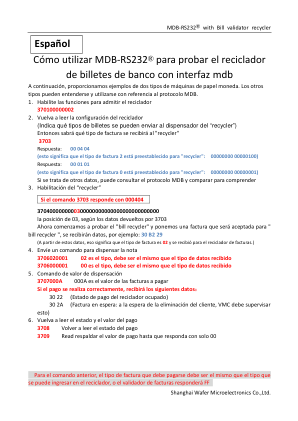
(表示可以发送给“回收器”取款机的钞票类型) 这样就能知道“回收器”收到的钞票类型是什么了 3703 响应:00 04 04 (这表示“回收器”预设的钞票类型 2:00000000 00000100) 响应:00 01 01 (这表示“回收器”预设的钞票类型 0:00000000 00000001) 如果是其他数据,可以参考 MDB 协议,对比了解 3.启用“回收站”

通过技术和创新之间的电动汽车制造商和电池回收器之间的协同作用:游戏理论方法
摘要:电池回收(PBR)引发了电动汽车工业链(EV)的深刻变化。PBR创新网络为企业提供了信息渠道和资源条件,但其对EV和PBR Enterprises的协同创新的影响和可持续发展能力的影响仍然需要进一步探索。在本文中,我们从2012年到2020年收集了PBR的专利数据,确定创新网络的结构特征,并为PBR技术构建了一种协同游戏模型,旨在分析PBR企业对技术创新的网络嵌入和知识溢出的协同效果。首先,我们发现PBR创新网络表现出小世界效应,该效应对技术合作创新具有双刃剑。第二,PBR技术创新主体的结构孔有益于对合作行为的重大影响。第三,知识合作的相关性和深层互补性的增强非常有用,可以弥补PBR技术合作创新的投入成本,并且由于结构漏洞的产出增加而产生了额外的收益。但是,随着创新网络的知识溢出效应的增加,公司往往更倾向于非合作创新。
如何使用MDB-RS232®用MDB接口
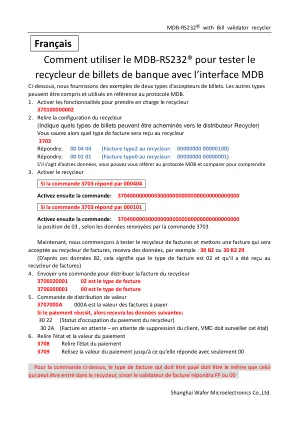
(表示可以将哪些类型的票路由到回收分销商),然后您会知道将收到哪种类型的发票3703回复:00 04 04(发票类型2回收:回收者:000000000000000000100)并比较理解3。激活回收器
铅酸电池清理基金向立法机关年度报告
围绕着前铅酸电池回收器,我们发现它们的操作污染了与这些回收商的污染区域。,但我们还发现,铅浓度通常超过80-PPM土壤铅筛查标准,超出了以前的电池回收器位置的可识别影响范围。实际上,众所周知,全球,整个美国和加利福尼亚的社区受到了来自各种来源的铅污染的影响,包括过去的工业运营,例如铅酸电池回收,但也是非批准工业设施,铅基涂料,铅管,铅管,采矿浪费和铅铅的历史燃烧。这就是为什么我们正在与美国地质调查局(USGS)进行研究,以开发一种方法,以帮助区分土壤中发现的各种潜在铅来源。这将有助于提供一个额外的科学工具来加强我们现有的工具和方法。
如何使用MDB-RS232®测试帐单回收
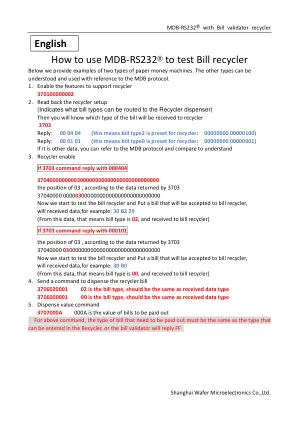
(指示可以将哪些账单路由到回收者分配器),然后您将知道将收到哪种类型的账单进行回收3703回复3703回复:00 04 04(这意味着2个帐单2账单为回收者:循环器:000000000000000000100)您可以参考MDB协议并比较了解3。回收器启用

带部分回收功能的太阳能联合循环的提案与分析
本文分析了一种集成太阳能联合循环,它是一种创新技术,包括具有部分回收功能的燃气轮机。假设采用传统的太阳能装置,包括带有导热油的槽式抛物线。该场为与热回收蒸汽发生器的高压蒸发器并联工作的太阳能蒸汽发生器供电。该工厂的设计目的是平衡太阳能对蒸汽循环的供应,并将热能转移到热回收器中的空气中,然后再将其引入燃烧室。因此,只有一小部分涡轮机废气流过热回收器。由于太阳能贡献而产生的额外蒸汽产量被热回收蒸汽发生器蒸发器上可用的较低功率所抵消,从而可以实现恒定的蒸汽涡轮机运行,而不管太阳能贡献如何。结果表明,该方案比传统的集成太阳能联合循环具有更好的性能和更低的发电成本。此外,还提出了一种评估工厂性能和经济评估的新方案,该方案已被证明有助于正确理解获得的结果。© 2020 作者。由 Elsevier Ltd. 出版。这是一篇根据 CC BY-NC-ND 许可协议 ( http://creativecommons.org/licenses/by-nc-nd/4.0/ ) 开放获取的文章。
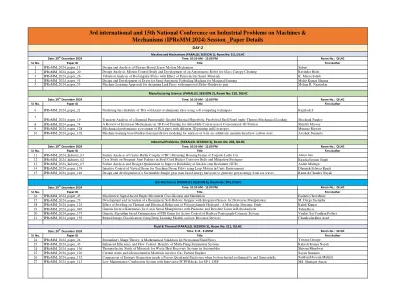
第三国际和第15国民...
时间:10:30 AM- 12:00 PM房间号 :DJLHC SI。 编号 纸张ID标题第一作者11 IPROMM_2024_INDUSTRY_01中心缓冲耦合器的故障分析(CBC)Torpedo play ldity car aditya aditya jain的安装外壳框架12 IPROMM_2024_INDUSTRY_02案例研究案例研究分析和设计优化,以提高堆栈器暨回收器(SCR)架构Mudugu 14 IPROMM_2024_PAPER_139对虚拟无人机的直觉控制,用于使用unity Environment dhanush Eshwar Rendi的LEAP Motion教授无人机飞行员,Dhanush Eshwar Rendi 15时间:10:30 AM- 12:00 PM房间号:DJLHC SI。编号纸张ID标题第一作者11 IPROMM_2024_INDUSTRY_01中心缓冲耦合器的故障分析(CBC)Torpedo play ldity car aditya aditya jain的安装外壳框架12 IPROMM_2024_INDUSTRY_02案例研究案例研究分析和设计优化,以提高堆栈器暨回收器(SCR)架构Mudugu 14 IPROMM_2024_PAPER_139对虚拟无人机的直觉控制,用于使用unity Environment dhanush Eshwar Rendi的LEAP Motion教授无人机飞行员,Dhanush Eshwar Rendi 15

105mm 轻型枪 - BAE 系统
后坐系统 后坐系统包括液压后坐制动器和液压气动回收器。后坐制动器通过旋转阀装置中的可变孔口节流油,使后坐质量静止。一对补偿管允许在后坐和跳动冲程期间系统内的体积发生变化,并允许油在热量的影响下膨胀。从任何仰角射击后,复原器将枪返回到完全跳动位置。后坐系统使用切断齿轮来减少更高仰角下的后坐长度。因此,无需为枪挖后坐坑。