XiaoMi-AI文件搜索系统
World File Search System多光谱的

比较多光谱的机器学习...
侵入性植物物种对本地生态系统构成了重大威胁,绘制其分布对于有效的管理和保护工作至关重要。本研究使用遥感图像比较了不同机器学习技术在侵入性植物物种Spathodea Campanulata的多光谱特征中的性能。使用随机抽样技术收集了基于地面的植被的位置数据,并从Sentinel-2获取了卫星图像。结果表明,使用机器学习技术,蓝色,绿色,红色,红色和近红外带可有效区分侵入性S. campanulata,不蔬菜和其他植被。支持向量机(SVM)技术达到了80%的最高总体准确性,其次是随机森林(RF),为73%和K-Nearest邻居(KNN),占66%。高斯混合模型(GMM)技术的总体准确性最低为53%。SVM和RF在预测和观察的类之间显示出很大的一致性,而KNN显示中度一致,GMM的一致性差。SVM产生的地图描述了研究区域北部地区的侵入性植物物种的分布。相比之下,南部地区(包括蒂莫兰山的保护区)显示出s。campanulata的密集存在,表明该物种正在进行的入侵。这强调了有效管理和保护工作的必要性,以减轻侵入性植物物种对本地生态系统的负面影响。
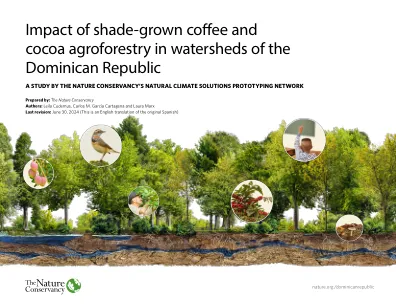
在多米尼加共和国的分水岭中,遮荫咖啡和可可农林的影响
图1。Yaque del Norte的位置(上)和多米尼加共和国内的Santo Domingo(下) ������农业研磨 ������农业研耗6图2。水基金内的不同类型的干预措施。描述农林业对社区和自然的不同利益的描述 - ������农业研耗 ������������������������������������������������������������������������� 10图4。位于圣多明哥的样品图的空间分布位于Yaque del Norte的样品图的空间分布。从a)a)多米尼加共和国的弗雷尔手册和b)修改图设计的设计图设计的设计,并带有三个用于数据收集的子图。比较2017年和2023年在Yaque del Norte,Nizao,Haina和Ozama流域的比较 ������农业研磨 �������农业研耗17图8。在分水岭的不同类型的干预措施中的地上碳库存估计 ������农业研磨 �������农业研耗19图9。从Google Earth Pro(a)的卫星图像的分辨率与无人机的图像(b)型号Mavic 3多光谱的图像之间存在差异。从Google Earth Pro(a)的卫星图像的分辨率与无人机的图像(b)型号Mavic 3多光谱的图像之间存在差异。

保罗·维利利奥(Paul Virilio)的谜语:知觉的声音和变态
这是一篇探索性文章,始于保罗·维利里奥(Paul Virilio)关于“他们看到的机器”产生的内部表示的性质和特征的问题,通过产生自动化和多光谱的现实感知。在1980年代后期写作,他预料到了很久以后发生的事情:对现实的预测性和统计解释的构成在纪律机构和战争的行为中越来越多地渗透到现实中。但是,他夸大了这些机器的这些内部表示,因为它们不需要任何视频退出,往往会将人排除在将要采取的机械想象中。避免了这种末世论的观点,即约翰·约翰斯顿提出的麦克里亚人愿景的概念更为合适:它解释了机器自动化的看法与人类的自动化感之间的差异,但探索了两者相连的共同地形。
强偏振量子阱红外光电探测器...
多光谱和/或极化成像是下一代红外摄像机不可避免的要求。1–9与单色/全球成像相比,狭窄和多光谱的成像可以提供更丰富的对象信息,从而确定对象的绝对温度,并降低相机对大气条件的敏感性。几个相邻光谱通道的组合有助于在复杂的环境中检测到埋藏的物体。5人工对象(例如金属和玻璃)通常具有与天然物体的极化特性不同的。因此,获取极化信息有可能识别某些对象,被认为是提高识别效率并减少错误警报的重要手段。2–4传统的多光谱和极化技术基于单个光谱焦平面阵列,光谱仪和/或极化器的掺入,这些光谱平面阵列,光谱仪和/或极化器通常需要高成本的机械扫描仪器和额外的空间。这些附加

使用无人驾驶汽车在沿海植被上估算红树林库存
背景和目标:红树林在通过吸收碳储备来缓解气候变化方面起着至关重要的作用。但是,缺乏有关红树林分布及其碳吸收能力的信息。因此,这项研究旨在通过收集有关红树林地区吸收碳库存的能力的数据来弥合这一差距。具体来说,本研究旨在通过现场调查,异形计算和无人驾驶飞机成像来评估Lantebung红树林生态系统的碳吸收潜力。方法:本研究中采用的方法包括沿Lantebung红树林生态系统内的South Sulawesi Makassar City沿海沿海沿海地区的现场调查,异形计算和多光谱的空中图像处理。进行现场调查,以确定每个红树林架的物种组成并测量其直径在乳房高度处。然后使用异态公式计算红树林生物量,然后将红树林生物量转换为碳库存值。空中图像,然后在归一化差异指数和碳库存值之间进行回归分析,以获得碳库存估计模型。的发现:从多光谱无人驾驶飞机上对红绿蓝色空中图像进行分析的结果为Lantebung红树林地区的红树林植被覆盖范围提供了宝贵的见解,显示出14.18公顷。结论:将无人机用作监测碳库存的技术带来了重大好处。归一化差异植被指数结果表明,红树林的物体在0.21-1的值范围内,分为三个密度类别:高密度和低密度红树林。现场调查证实了Lantebung Makassar中存在三种红树林,即Rhizophora apiculata,Rhizophora Mucronata和Avicennia sp。进行的回归分析是为了评估标准化差异指数价值与碳库存之间的关系,产生了方程模型碳库存= 474.61,植被指数值 + 17.238,线性回归值为0.7945。预计低密度类红树林区域的碳库值在17.24至288.64吨之间,每公顷碳的碳含量在126.04至391.14吨之间,每公顷和高密度的碳含量在126.04至391.14吨之间配备了多光谱传感器的无人机可在许多生态系统中收集有关植被和高度的精确和全面数据。调查和随后的分析强调了Lantebung红树林生态系统中红树林密度的广泛差异。这项研究表明,使用无人驾驶汽车提取的归一化差异指数与从实际田间测量获得的红树林碳含量之间存在很强的相关性。

与机器视觉集成的高分辨率微射流喷雾器的实时控制,用于精密杂草控制Raja,r。屠杀,哥伦比亚特区; Fennimore,
愿景,深度学习以及机器人和其他技术学,可能有助于减轻对更可持续的农业系统的需求。但是,传统的工业机器人不是为典型农业生态系统的复杂环境而设计的。农业领域中最关键的害虫控制问题之一是杂草控制,这是目前是一项劳动力的任务。因此,自动化杂草控制系统的需求很大。蔬菜场中的机器人内部杂草控制需要机器视觉,作物定位,决策和代理系统。缺乏可靠的技术来检测,定位和分类杂草和作物植物是开发针对特种蔬菜等特种耕作的完全自动化和全面的杂草管理系统的主要技术障碍。在杂草密度中等至高杂草密度的杂草田中,现有的机器人除草机变得混乱,因为它们无法解释过去的几十年,研究人员一直在尝试各种方法来实时区分杂草的杂草 - 杂草 - 杂草浓度。Lee等。 (1999)提出并开发了一个实时机器视觉系统,该系统以3 fps的速度区分了番茄植物和杂草,代表114毫米101毫米的种子线面积,允许杂草控制系统以1.20 kmh 1的速度传播。 番茄植物在75.8%的时间内正确识别,低于所需的准确性。 Lamm等。 (2002)开发了一种基于Lee El al的棉花的精确杂草映射的系统。 Slautter等。Lee等。(1999)提出并开发了一个实时机器视觉系统,该系统以3 fps的速度区分了番茄植物和杂草,代表114毫米101毫米的种子线面积,允许杂草控制系统以1.20 kmh 1的速度传播。番茄植物在75.8%的时间内正确识别,低于所需的准确性。Lamm等。(2002)开发了一种基于Lee El al的棉花的精确杂草映射的系统。Slautter等。的(1999)原型,并达到了88%的歧视精度。(2008)开发了一种多光谱的机器视觉识别系统,以对杂草的生菜作物分类,并获得90.3%的精度。Haff等。 (2011年)后来提出了一个基于X射线的作物检测系统,该系统达到了90.7%的tomatoplantsatthetthervavel speedof1.6kmh 1的检测准确性。 zhangetal。 (2012)提出了一种高光谱成像系统,以实时识别作物植物并将其与杂草区分开。 该系统在区分杂草的作物方面达到了95.8%的准确性。 有许多关于AI,机器学习,深度学习技术的研究工作,以对杂草进行分类(Bah等,2018; Osorio等,2020)。 Osorio等。 (2020)使用多光谱摄像机在生菜场和应用的SVM(支撑矢量机),Yolov3(您只看一次V3)和掩盖r e cnn(基于区域的综合神经网络)中的图像,以在杂草和作物之间进行分类,并在79%,89%,89%,89%,89%,89%,89%,89%,89%的差异Haff等。(2011年)后来提出了一个基于X射线的作物检测系统,该系统达到了90.7%的tomatoplantsatthetthervavel speedof1.6kmh 1的检测准确性。zhangetal。(2012)提出了一种高光谱成像系统,以实时识别作物植物并将其与杂草区分开。该系统在区分杂草的作物方面达到了95.8%的准确性。有许多关于AI,机器学习,深度学习技术的研究工作,以对杂草进行分类(Bah等,2018; Osorio等,2020)。Osorio等。(2020)使用多光谱摄像机在生菜场和应用的SVM(支撑矢量机),Yolov3(您只看一次V3)和掩盖r e cnn(基于区域的综合神经网络)中的图像,以在杂草和作物之间进行分类,并在79%,89%,89%,89%,89%,89%,89%,89%,89%的差异