XiaoMi-AI文件搜索系统
World File Search System多角度

多角度量子近似优化算法
量子近似优化算法 (QAOA) 使用由量子演化的参数化层定义的变分拟设电路来生成组合优化问题的近似解。理论上,随着拟设深度的增加,近似度会提高,但门噪声和电路复杂性在实践中会损害性能。在这里,我们研究了一种 QAOA 的多角度拟设,它通过增加经典参数的数量来减少电路深度并提高近似率。即使参数数量增加,我们的结果表明,对于我们考虑的测试数据集,可以在多项式时间内找到好的参数。与 QAOA 相比,这种新的拟设使无限系列 MaxCut 实例的近似率提高了 33%。最佳性能的下限由传统拟设确定,我们针对八个顶点的图给出了经验结果,即多角度拟设的一层与 MaxCut 问题上传统拟设的三层相当。类似地,在 50 个和 100 个顶点图上的 MaxCut 实例集合上,多角度 QAOA 在相同深度下比 QAOA 产生更高的近似率。许多优化参数被发现为零,因此可以从电路中移除它们相关的门,从而进一步降低电路深度。这些结果表明,与 QAOA 相比,多角度 QAOA 需要更浅的电路来解决问题,使其更适合近期的中型量子设备。
基于拉丁超行的储能的网格连接风电场的多角度可靠性评估
摘要:旨在应对慢速和储能中电源系统可靠性评估的较差的问题的问题,本文提出了一种基于拉丁超级立方体重要采样(LHIS)的可靠性评估方法。首先,我们的目的是通过将拉丁超立方体抽样方法与重要采样方法相结合,以建立拉丁超立方体重要的采样评估模型。其次,我们旨在优化组件的样本概率分布并进行系统的层次采样。然后,提出了综合风险指标(CRI)来评估运营风险,并提出了风储存中断的能源收益(WSGIEB)来评估可靠性的贡献。最后,通过各种电源系统操作方案进行了仿真实验。模拟结果表明,所提出的方法比评估速度提高的重要性采样方法(IM-IS)高47%,比在计算准确性方面的重要性采样方法提高了33%。

tcl-net:具有频率域融合和多角度注意的轻巧有效的飞行网络
摘要。朦胧的图像带来了一个具有挑战性的问题,由于信息丢失和颜色失真而遭受。当前的基于深度学习的去悬式方法通过增加网络深度来增强性能,但会导致大量参数开销。同时,标准卷积层集中在低频细节上,通常会说出高频信息,这阻碍了模糊图像中提出的先前信息的有效利用。在本文中,我们提出了TCL-NET,这是一个轻巧的飞行网络,该网络强调了频域特征。我们的网络首先包含一个用于提取高频和低频内形式的所谓层,该层是针对原始模糊图像的快速变压器专门设计的。同时,我们设计了一个频率域信息融合模块,该模块将高频和低频信息与后续卷积层的卷积网络作品集成在一起。此外,为了更好地利用原始图像的空间信息,我们引入了一个多角度注意模块。使用上述设计,我们的网络以仅0.48MB的总参数大小实现了出色的性能,与其他最先进的轻量级网络相比,参数的数量级降低了。

利用多角度长波红外高光谱数据融合三维地形重建进行地雷探测和雷区测绘
高光谱长波红外遥感与区域三维重建相结合,可提高探测可靠性,减少在山区和丘陵地区搜寻地下物体(杀伤人员地雷、简易爆炸装置和未爆炸弹药)时的误报频率,因为这些地区难以使用扫雷器。多角度遥感使我们能够排除被遮蔽并以一定角度放置的物体的跳跃,并将含有异常物体的土壤与普通土壤和表面不规则物分开。给出了用于雷区测绘的光学数字综合体的概念,其主要基础是高光谱设备,该设备从两个光学通道接收数据,并将它们分成长波红外范围内的数十个光谱通道。一个光学通道扫描天底,第二个通道以一定角度扫描土壤表面。该综合体还包括一个可见光范围的相机,用于接收不同空间平面中的一系列图像以进行进一步的三维重建。描述了一种获取分段高光谱数据并将其与重建的数字地形模型相结合的方法,用于解决隐藏地面和地下物体的探测、侦察以及在不同坡度地形上规划人道主义排雷任务的问题。
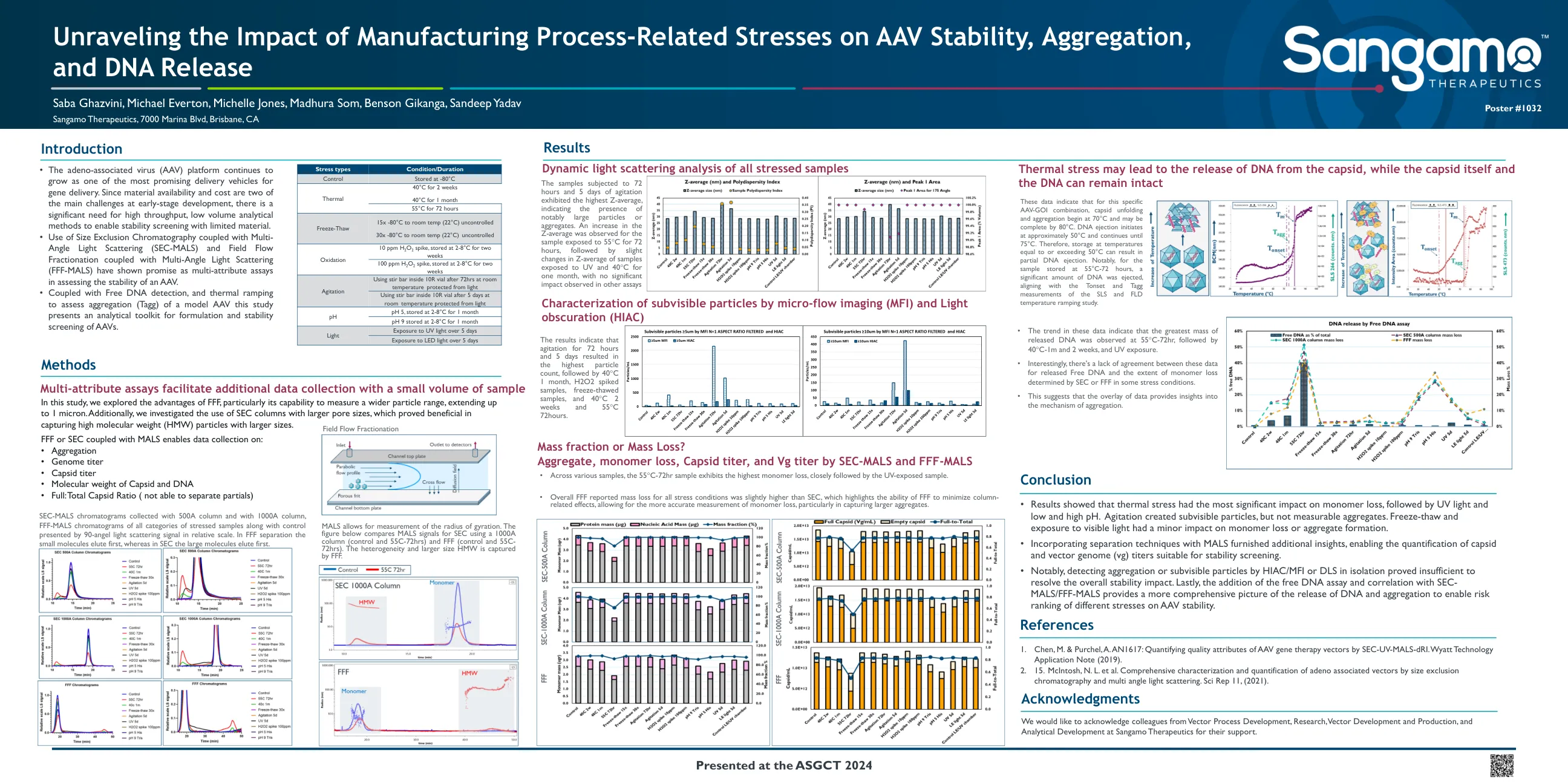
海报#1032 Saba Ghazvini,Michael Everton,Michelle Jones,Madhura Som,Benson Gikanga,Sandeep Yadav
•与腺相关的病毒(AAV)平台继续成为基因输送最有前途的输送车之一。由于物质可用性和成本是早期发展的主要挑战,因此非常需要大量吞吐量,低容量的分析方法,以实现有限的材料来实现稳定性筛查。•使用尺寸排除色谱与多角度光散射(SEC-MALS)和场流量分级配合以及多角度光散射(FFF-MALS)在评估AAV的稳定性方面表现为多属性测定。•与自由DNA检测和热坡道相结合以评估AAV模型的聚合(TAGG),此研究提出了一个分析工具包,用于配方和稳定性筛选AAV。
使用
摘要 — 本文建议使用多角度高光谱长波红外遥感技术结合区域三维重建,以提高探测可靠性,减少在山区和丘陵地区搜寻地下物体(杀伤人员地雷、简易爆炸装置和未爆炸弹药)时的误报频率,因为这些地区难以使用扫雷器。多角度遥感技术可以排除被遮蔽并以一定角度放置的物体的跳跃,并将含有异常物体的土壤与普通土壤和表面不规则物分开。给出了用于雷区测绘的光学数字综合体的概念,其主要基础是高光谱设备,该设备从两个光学通道接收数据,并将它们分成长波红外范围内的数十个光谱通道。一个光学通道扫描天底,第二个通道以一定角度扫描土壤表面。该综合体还包括一个可见光范围的相机,用于接收不同空间平面中的一系列图像以进行进一步的三维重建。描述了一种获取分段高光谱数据并将其与重建的数字地形模型相结合的方法,用于解决隐藏地面和地下物体的探测、侦察以及在不同坡度地形上规划人道主义排雷任务的问题。


对自动化设施的所有阶段的强大帮助...
具有干扰检查,座位显示,计时器(周期时间测量),放置简单工件和模型形状,加载3D CAD数据,将3D仿真保存到视频文件以及多角度视图这些功能的精确模拟,将3D CAD模拟保存到高度准确性和高度估计。从简单的轮廓模拟到“获取图片”到更接近实际机器实施的准确模拟,Tsassist有力地协助机器人自动化系统生命周期的所有阶段,从最初的“草图”,规划,建议,设计和安装,到改进和重新使用现有设施。

安全道路AI:多角度的实时事故检测
在道路安全领域取得了显着的成就,为当局提供了一个有效的实时事故监控和响应工具。该系统审查多角度碰撞镜头的能力促进了对事故的更全面的理解,从而使紧急服务和交通管理当局能够做出明智的决定。“安全道路AI”的影响是深远的,特别是减少了急诊人员对事故现场的反应时间,可能减轻死亡人数并减轻伤害严重程度。此外,该系统积累的数据对于交通分析和更安全的道路基础设施的增强非常宝贵。此外,保险公司还从更精确和公正的事故评估中获得了收益,从而提出了更公正的索赔裁决。