XiaoMi-AI文件搜索系统
World File Search System天窗

COROB-X:月球天窗探索合作机器人团队
CoRob-X 项目开发并展示了多智能体机器人团队探索行星表面的支持技术,重点是难以到达的区域,这些区域需要协作方案才能有效探索复杂环境。探索熔岩管是一个非常具有挑战性的环境,需要一组机器人能够以自主的方式协作,找到通往地下管道系统的路,通过天然入口孔(所谓的天窗)下降,并使用有效载荷仪器探索内部以提供科学数据。为实现这一雄心勃勃的目标而开发的机器人探索系统由三辆具有显著不同技术特性的探测车组成。本文介绍了总体方法,即控制架构、机器人系统和要使用的软件。它还展示了将在现场测试活动中演示的选定任务阶段。此外,还提出了一个陆地采矿用例,展示了如何将开发的自主软件转移到陆地应用程序。

Energy Star版本7.0住宅窗户,门,...
10 1。符合当前的能量明星资格标准,该标准定义了性能要求和测试11个住宅窗户,门和天窗的程序。可以在www.energystar.gov/specifations上找到合格产品及其相应的12个资格标准的列表。13 2。在将能量星的名称或标记与任何产品相关联之前,请从14个国家召唤评估委员会获得认证,这是EPA认可的住宅窗户,15扇门和天窗的认证机构。作为此认证过程的一部分,必须在EPA认可的16个实验室中测试产品,以执行住宅窗户,门和天窗测试。可以在www.energystar.gov/testingandverification中找到EPA认可的实验室17和认证机构的清单。
2024 年地方法律第 7 条 太阳能法规
主建筑或附属建筑的屋顶太阳能系统,其设计和建造为屋顶框架、护套或表面的组成部分。建筑集成系统的组件可设计为替换或取代建筑屋顶的建筑或结构元素,并补充、融合或构成建筑外观的一部分。这些组件将与它们集成的屋顶线或屋顶保持统一的平面,和/或构成屋顶线或屋顶的一部分。这种系统代替单独的太阳能系统,其中系统的组件独立于建筑结构设计和连接到建筑物。建筑集成系统可出现在透明天窗系统内、屋顶系统内,取代传统的屋顶材料。集成到任何建筑天窗系统中的光伏建筑组件和屋顶材料的组合。

新款 E-DOBLÒ
有了 Magic Top,您的旅途将更加明亮。天窗可让阳光洒满乘客舱,同时保持车内凉爽,还设有一个隔间,方便您存放所有旅行物品。装载物品更加轻松,甚至无需打开后备箱:借助 Magic Window,您可以随身携带所有所需物品。
远洋船舶入级检验规则附件 ...
处所及其可燃性信息、耐火和阻燃分隔开口的关闭装置、门的关闭、罩壳、通风管道、烟囱的环形空间、天窗和货舱、机械舱和泵舱的其他开口,以及消防、火灾报警和探测系统的描述(描述可包含在规范中,参见本附件 3.1);
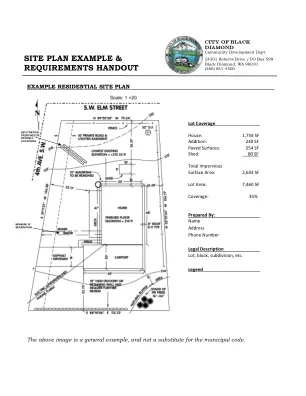
场地规划示例及要求讲义
门廊、窗台、壁柱、装饰性建筑、飞檐、屋檐、排水沟、天窗延伸部分、温室或凸窗以及类似建筑、甲板、门廊、露台、人行道和其他可能侵入后退区的次要结构元素;显示这些元素与地界线的距离和高度。s. 显示车库和所有其他拟议停车区的尺寸。标明拟议的串联

为枫糖浆尿液疾病开发的基因疗法表明有望
研究人员发现,从早期生活中暴露于广谱抗生素的小鼠长期以来,代谢健康状况较差。如果小鼠在出生后不久的10天窗口中接受了抗生素,则它们会出现较少的β细胞 - 胰腺中产生胰岛素的细胞的调节血糖。抗生素治疗的小鼠在成年期的血糖水平较高,胰岛素水平较低。