XiaoMi-AI文件搜索系统
World File Search System导纳
基于近端策略优化算法及视觉感知的机械臂导纳控制研究
在现代操纵器交互任务中,由于环境的复杂性和不确定性,准确的对象表面建模通常很难实现。因此,改善操纵器与环境之间相互作用的适应性和稳定性已成为相互作用任务的重点之一。针对操纵器的互动任务,本文旨在在视觉指导下实现良好的力量控制。因此,基于Mujoco(带有触点的多关节动力学)物理引擎,我们为操纵器构建了交互式仿真环境,并创新地集成了基于位置的视觉伺服控制和录取控制。通过深度强化学习(DRL)中的近端策略优化(PPO)算法,有效地集成了视觉信息和力量信息,并提出了结合视觉感知的接收性控制策略。通过比较实验,将允许控制与视觉感知相结合,并将力控制的整体性能提高了68.75%。与经典的入学控制相比,峰值控制精度提高了15%。 实验结果表明,在平坦和不规则的凹面环境中,允许控制与视觉感知结合表现良好:它不仅可以准确地执行视觉构成的力控制任务,而且还可以在各种接触表面上维持施工力,并迅速适应环境变化。与经典的入学控制相比,峰值控制精度提高了15%。实验结果表明,在平坦和不规则的凹面环境中,允许控制与视觉感知结合表现良好:它不仅可以准确地执行视觉构成的力控制任务,而且还可以在各种接触表面上维持施工力,并迅速适应环境变化。在精确组装,医疗援助和服务操纵器的领域中,它可以提高操纵器在复杂和不确定的环境中的适应能力和稳定性,从而促进智能操纵器的自主操作的发展。

EE3122:模拟电路基础
反馈放大器双端口网络:阻抗参数、导纳参数、混合参数、传输参数。理想的反馈放大器:增益稳定性、信噪比、对增益和带宽的影响。反馈放大器的类型;负载效应。实际反馈放大器:电压放大器、跨导纳放大器、跨阻抗放大器、电流放大器、稳定性预测、频率响应。

使用脑监测客观评估人机物理协作中的人类工作量
安全和顺从交互的概念不足以确保有效的物理人机合作。为了获得最佳的顺从行为(例如,可变阻抗/导纳控制),需要使用评估技术来衡量用户感知工作量方面的交互有效性。本研究调查了脑电图 (EEG) 监测作为一种客观测量方法,以对具有顺从性的合作操作中的工作量进行分类。进行了一项实验研究,包括两种类型的操作(粗略和精细)和两个导纳水平(低阻尼和高阻尼)。性能和自我报告的测量表明,增强感知工作量的适当导纳水平取决于任务。此信息用于形成二元分类问题(低和高工作量),其中频谱功率密度和相干性是从 EEG 数据中提取的特征。使用与受试者无关的特征选择方法,使用与受试者相关的线性判别分析 (LDA) 进行分类。平均分类率为 81%,表明所提出的方法在评估人类工作量与粗大和精细操作中不同顺从性之间的交互作用时具有可靠性。此外,为了验证我们提出的客观工作量测量方法,我们进行了第二次实验,包括精细和粗大运动任务。与恒定导纳交互相比,使用开环可变导纳控制器可观察到较低的基于 EEG 的工作量。该观察结果与主观工作量评分 (NASA-TLX) 一致。
人形机器人 Pyrène 的反应性步行
2 背景——实习开始时的最新水平 9 2.1 人形机器人行走:运动背后的方程式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12 2.2 求解方程:控制方案的实施 . ... . . . . . . . . . . 19 2.3.1 通过控制发散运动分量进行接触扳手控制 20 2.3.2 全身导纳控制:CoM 策略 . . . . . . . . . . 21 2.4 实习目标 . . . . . . . . . . . . . . . 21 2.5 一般方法 . . . . . . . . . . . . . .... .... .... .... .... .... 22
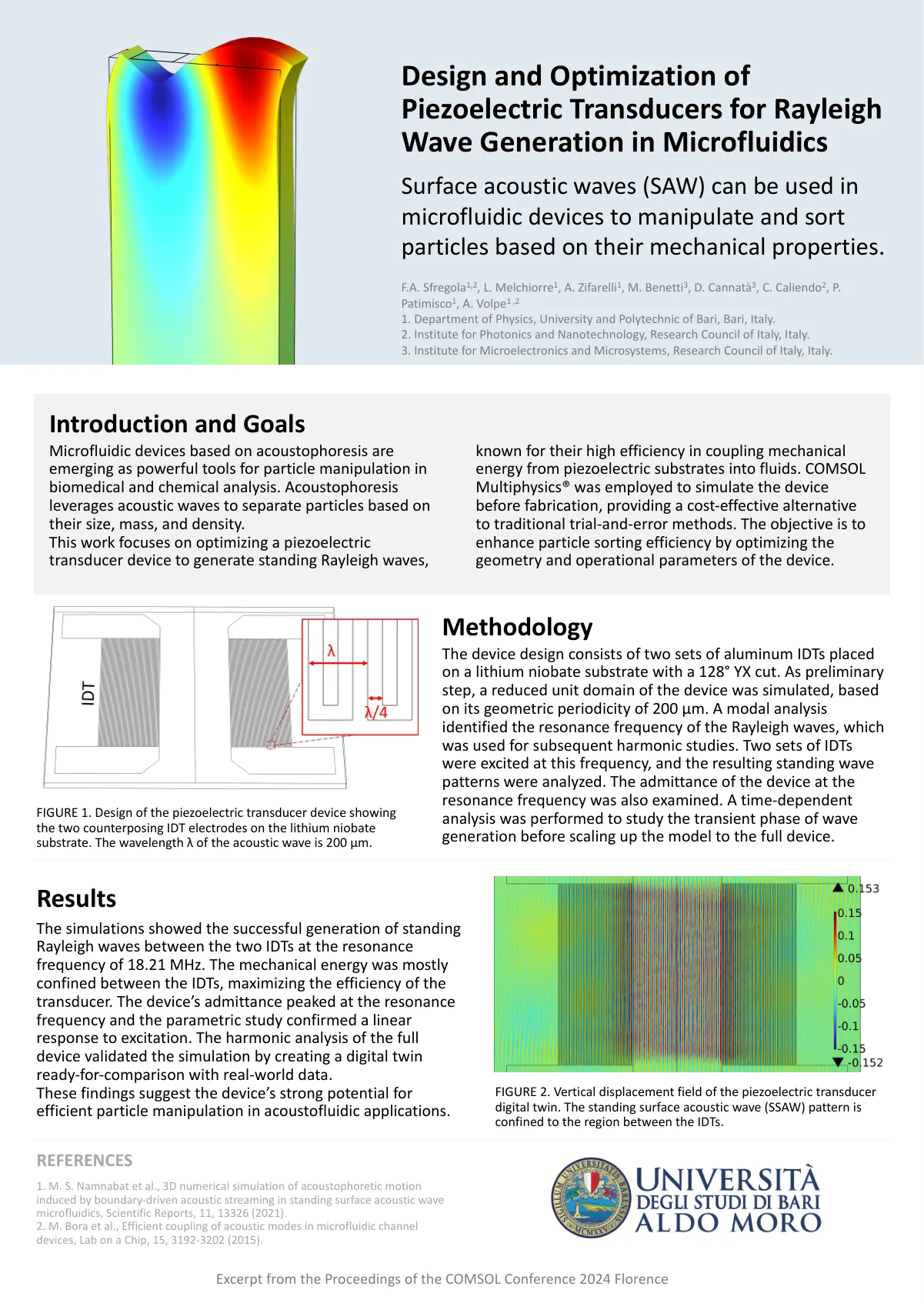
表面声波 (SAW) 可用于微流体装置,根据粒子的机械特性对其进行操纵和分类。
该器件设计由两组铝 IDT 组成,放置在具有 128° YX 切口的铌酸锂基板上。作为初步步骤,基于器件的几何周期 200 μm,模拟了器件的缩小单元域。模态分析确定了瑞利波的共振频率,该频率用于后续的谐波研究。两组 IDT 在该频率下受到激励,并分析了由此产生的驻波模式。还检查了器件在共振频率下的导纳。在将模型扩展到完整器件之前,进行了时间相关分析以研究波产生的瞬态阶段。

适用于卫星通信应用的双波段、正交极化 LP 至 CP 转换器
摘要 — 提出了一种双波段、正交极化线性到圆极化 (LP-to-CP) 转换器的系统设计。这类极化转换器可以在两个独立的非相邻频带中将线性极化波转换为右旋和左旋圆极化 (RHCP 和 LHCP) 波。报道的极化器由三个级联的双各向同性薄片导纳组成,由两个各向同性介电板隔开。通过阻抗边界条件研究电磁问题。设计中采用了周期性加载传输线的传输矩阵分析。建立了一个分析模型,并推导出每个薄片导纳频率响应的闭式表达式。该方法避免了使用多参数优化程序。提出了一种用于 K/Ka 波段卫星通信应用的双波段、正交极化 LP-to-CP 转换器的示例。偏振器在 K/Ka 波段的发射和接收通道上分别执行 LP 到 LHCP 和 LP 到 RHCP 的转换。该设计通过原型进行了验证。在垂直入射下,偏振器在 18-22.2 GHz(∼ 21%)和 28.7-30.4 GHz(∼ 6%)波段上的轴比 (AR) 低于 3 dB。在相同的两个波段内,总透射率高于 -1 dB。扫描角度在 ± 45 ◦ 以内时性能稳定。对于 45 ◦ 的入射角,在 17-22 GHz(∼ 25.6%)和 28.6-30 GHz(∼ 4.7%)波段上的 AR 低于 3 dB,总透射率高于 -1.2 dB。

2024-2029-Navajo-Nation-Comphersensive-Comenonic- ...
纳瓦霍国家经济发展局(DED)已准备好全面的经济发展战略(CEDS),作为一个经济路线图,以指导纳瓦霍国家的经济发展倡议,以实现经济繁荣和韧性。CEDS是一种协作,基于区域的,基于解决方案的方法,旨在使Navajo国家获得实现经济发展成功和自给自足的能力。CEDS包括摘要背景,SWOT分析和战略方向,其中包括经济愿景,优先事项,目标,目标和行动。CEDS涉及纳瓦霍国家,经济发展部(DED)和社区成员的合作努力。创建了CEDS来补充DED的使命,愿景和整体战略方向。CEDS的最后更新是在2018年。

控制、机器人和自主系统年度回顾体现沟通:机器人和人类如何通过物理交互进行沟通
早期对物理人机交互 (pHRI) 的研究必然侧重于设备设计——创建兼容和传感硬件,如外骨骼、假肢和机械臂,使人们能够安全地与机器人系统接触并交流他们的协作意图。随着硬件功能已足以满足许多应用的需求,并且计算能力越来越强大,支持流畅和富有表现力地使用 pHRI 系统的算法已开始在确定系统的实用性方面发挥重要作用。在这篇评论中,我们描述了一系列用于调节和解释 pHRI 的代表性算法方法,描述了从基于物理类比的算法(如导纳控制)到基于高级推理的计算方法的进展,这些方法利用了多模态通信渠道。现有的算法方法在很大程度上支持特定于任务的 pHRI,但它们不能推广到多功能的人机协作。因此,在整个评论和我们对下一步的讨论中,我们认为新兴的具身
电力系统分析与设计(作者:Glover 和
案例研究:整合北美电网 162 案例研究:电网拥塞 - 疏通北美电网动脉 167 4.1 输电线设计考虑因素 173 4.2 电阻 178 4.3 电导 181 4.4 电感:实心圆柱导体 181 4.5 电感:单相两线线路和相距相等的三相三线线路 186 4.6 电感:复合导体、不等相距、捆绑导体 188 4.7 串联阻抗:带有中性导体和接地回路的三相线路 196 4.8 电场和电压:实心圆柱导体 201 4.9 电容:单相两线线路和相距相等的三相三线线路204 4.10 电容:绞合导线、不等相间距、捆绑导线 206 4.11 分流导纳:带有中性导线和接地回路的线路 210 4.12 导线表面和地面的电场强度 215 4.13 并联电路三相线路 218
电力系统分析与设计 - ElCoM
案例研究:整合北美电网 162 案例研究:电网拥塞 - 疏通北美电网动脉 167 4.1 输电线设计考虑事项 173 4.2 电阻 178 4.3 电导 181 4.4 电感:实心圆柱导体 181 4.5 电感:单相两线线路和相距相等的三相三线线路 186 4.6 电感:复合导体、不等相距、捆绑导体 188 4.7 串联阻抗:带有中性导体和接地回路的三相线路 196 4.8 电场和电压:实心圆柱导体 201 4.9 电容:单相两线线路和相距相等的三相三线线路 204 4.10 电容:绞合导线、不等相间距、捆绑导线 206 4.11 分流导纳:带有中性导线和接地回路的线路 210 4.12 导线表面和地面的电场强度 215 4.13 并联电路三相线路 218