XiaoMi-AI文件搜索系统
World File Search System将门
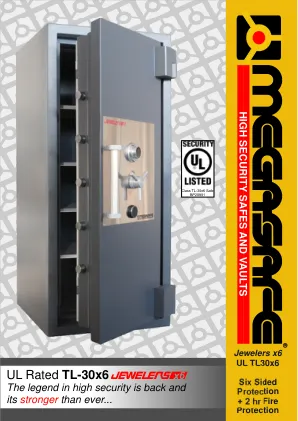
MX 珠宝商 UL TL-30x6 - Megasafe
重型三向机制配有长螺栓,可接合螺栓将门锁在保险箱主体上。连续的加固互锁导轨将门固定在铰链侧。经过验证的平衡设计经受住了时间的考验。我们在设计独特的“拉动和旋转”机制时不惜一切代价,该机制使用巧妙的离合器系统接合机制并仅在两个锁都打开时才允许操作手柄 - 这是保险箱行业的独特功能,其他保险箱均无法做到这一点。最后,四个主动重新锁定装置可保护两个锁和重要部位。如果玻璃因使用工具、喷灯或爆炸物而破碎,四个重新锁定装置可锁定机制的所有活动部件,另外还可以锁定机制并防止保险箱被打开。





诚征科技项目建议书……
iv. 项目提案必须在 2024 年 11 月 15 日前通过 SATYABHAMA 门户网站 (research.mines.gov.in) 在线提交。门户网站上还提供用户手册,其中重点介绍了提交项目提案的分步程序。此外,需要将门户网站生成的 PDF 格式的项目提案软拷贝发送到以下电子邮件:met4-mines@gov.in。之前已在 SATYABHAMA 门户网站上注册的 PI 无需再次注册,可以使用相同的凭据登录门户网站提交项目。PI 无需发送项目提案的硬拷贝。以实物形式提交的项目提案将不被接受。入围项目的 PI 将被指示亲自(在德里或印度任何其他城市)或通过视频会议展示他们的提案,并将通知他们。时间表如下:
实施数字旅游门户
o ICAO 附加说明:在国家拥有交互式 API 的情况下,国家可以将门户网站与其向航空公司发送的交互式 API 响应消息 (CUSRES) 结合起来,向航空公司提供 OK / NOT OK 登机消息 ICAO 还推出了“健康主列表”,使政府数字旅行门户网站能够自动和电子验证旅行者提交的 COVID-19 证书是否真实。因此,WTTC 鼓励所有政府遵循上述两项 ICAO 建议,建立一个与行业具有数字连接的数字旅行门户网站,并加入和使用 ICAO 健康主列表对旅行者的 COVID-19 证书进行数字验证。有关数字旅行门户网站与“ICAO 健康主列表”集成的更多信息将在本报告后面包含。
确保IBM I:双重责任
技术不幸的是,随着技术的发展,曾经是安全架构的现实可能不足。以AS/400的初期为例。 当时,保护数据非常容易。 您只需要将用户限制在菜单上,请确保如果他们退出菜单,则签署了他们的会话,并将配置文件配置为有限的用户,以便用户无法从命令行中输入命令。 由于用户可以通过5250模拟器访问系统的唯一方法,因此数据是安全的。 输入TCP/IP,PC和其他技术,该安全方案远远不足以保护数据。 人们虽然发展IBM的男人和女人是最好的,但毕竟他们是人类。 ,众所周知,人类会犯错。 意图并进行测试,不幸的是,有些错误将门溜走了。 开源,因为希望保持技术的最新状态并满足IBM I用户社区的需求,因此开源已被操作系统和业务合作伙伴都广泛使用。 我敢肯定,您知道,开源社区并非没有其安全问题。 因此,如果开源产品或技术存在安全问题,并且在IBM I,IBM上可用,我也可能会受到影响。以AS/400的初期为例。当时,保护数据非常容易。您只需要将用户限制在菜单上,请确保如果他们退出菜单,则签署了他们的会话,并将配置文件配置为有限的用户,以便用户无法从命令行中输入命令。由于用户可以通过5250模拟器访问系统的唯一方法,因此数据是安全的。输入TCP/IP,PC和其他技术,该安全方案远远不足以保护数据。人们虽然发展IBM的男人和女人是最好的,但毕竟他们是人类。,众所周知,人类会犯错。意图并进行测试,不幸的是,有些错误将门溜走了。开源,因为希望保持技术的最新状态并满足IBM I用户社区的需求,因此开源已被操作系统和业务合作伙伴都广泛使用。我敢肯定,您知道,开源社区并非没有其安全问题。因此,如果开源产品或技术存在安全问题,并且在IBM I,IBM上可用,我也可能会受到影响。

展示从没有状态估计的像素飞行的敏捷飞行
摘要 - 次数是最敏捷的飞行机器人之一。尽管在基于学习的控制和计算机视觉方面取得了进步,但自动无人机仍然依赖于明确的状态估计。另一方面,人类飞行员仅依靠从板载摄像头的第一人称视频流将平台推向极限,并在看不见的环境中坚固地飞行。据我们所知,我们提出了第一个基于视觉的四摩托系统,该系统自动浏览高速的一系列门,而直接映射像素以控制命令。像专业的无人机赛车飞行员一样,我们的系统不使用明确的状态估计,并利用人类使用的相同控制命令(集体推力和身体速率)。我们以高达40 km/h的速度展示敏捷飞行,加速度高达2 g。这是通过强化学习(RL)的基于识别的政策来实现的。使用不对称的参与者批评,可以促进培训,并获得特权信息。为了克服基于图像的RL训练期间的计算复杂性,我们将门的内边缘用作传感器抽象。可以在训练过程中模拟这种简单但坚固的与任务相关的表示,而无需渲染图像。在部署过程中,使用基于Swin-Transformer的门检测器。我们的方法可实现具有标准,现成的硬件的自动敏捷飞行。尽管我们的演示侧重于无人机赛车,但我们认为我们的方法超出了无人机赛车的影响,可以作为对结构化环境中现实世界应用的未来研究的基础。