XiaoMi-AI文件搜索系统
World File Search System悬臂式
附录 B 案例研究测量需求:汇编
创新的技术障碍:[为什么现在或需要时无法合理实施创新?有什么技术障碍?]人们对这种特定大分子自组装的基本现象了解不多,行为变化不可预测。缺乏悬臂式 MEMs 设备材料性能的技术数据,阻碍了所需新型传感器的开发。客户对第一代激光测绘制导系统竞争类型未经验证的能力感到不确定,阻碍了这项技术的接受。
风洞压力测量技术
1. 简介.......................................................................................................................................................................................................................................................................................................................................................................................1 2. 传感器....................................................................................................................................................................................................................................................................................................................................3 2. 1 可变电阻传感器....................................................................................................................................................................................................................................................................3 2. 1 可变电阻传感器....................................................................................................................................................................................................................................................................3 2. 1. 1 电位计压力传感器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 2.1.2.1 表压隔膜压力传感器..................................................................................................................................6 2.1.2.2 悬臂式传感器..................................................................................................................................................8 2.1.2.3 压力容器传感器..................................................................................................................................................................9 2.1.2.4 嵌入式应变计传感器..................................................................................................................................................9 9 2.1.2.5 非粘结应变计压力传感器....................................................................................................................10 2.1.2.6 10 2.2 可变磁阻压力传感器....................................................................................................................................11 2.2.1 膜片式可变磁阻传感器....................................................................................................................................11 2.2.2 波登管可变磁阻压力传感器....................................................................................................................................12 2.2.3 线性可变差动变压器 (LVDT) 型传感器... . . . . . 13 2.2.4 可变磁阻压力传感器的一般性能 . . . . . . . 13 2 . 3 可变电容压力传感器
Metrology-Dektak-XT-Brochure.pdf - PTA
DektakXT 设计中的几项进步使其具有 4 埃重复性的性能。DektakXT 平台采用单拱结构,比悬臂式设计更坚固、更耐用,从而降低了对声学和地震噪声等不利环境条件的敏感度。作为对这种拱形结构的补充,布鲁克显著提高了电子设备的稳定性,减少了温度变化并采用了现代处理器。这些“智能电子设备”采用了先进的电路设计来最大限度地减少导致误差的噪声,使 DektakXT 成为一种更强大的系统,用于测量 <10nm 台阶高度。独特的单拱设计和智能电子设备的结合使本底噪声大大降低,并使 DektakXT 在竞争性触针轮廓仪产品中脱颖而出。
飞机维护手册 - Aerospool
WT9 Dynamic LSA / Club 飞机是单引擎、双座(并排布置)、悬臂式低翼飞机,带有十字形尾翼。主要结构由玻璃和碳复合材料组成。飞机配备固定三轮起落架和可转向前轮。该飞机由 4 缸、水平对置、空气和水冷、化油器 4 冲程发动机 ROTAX 912 ULS2 驱动,最大功率为 73.5 kW (100 hp),转速为 5800 rpm。该飞机装有螺旋桨 EVRA PerformanceLine 175/xxx/805.5。它是 3 叶地面可调螺旋桨,直径为 1750 毫米 (68.9 英寸)。它具有木质核心叶片,由玻璃纤维覆盖,前缘加固。叶片安装在铝制轮毂中。螺旋桨轮毂连接到法兰和底板上,并固定在发动机的螺旋桨法兰上。复合材料整流罩固定在底板上。该飞机用于运动、休闲和旅游飞行,仅获准在 VFR 日间运行。
飞机维护手册 - Aerospool
WT9 Dynamic LSA / Club 飞机是单引擎、双座(并排排列)、悬臂式低翼飞机,带有十字形尾翼。主要结构由玻璃和碳复合材料组成。飞机配备固定三轮起落架,带有可操纵前轮。飞机由 4 缸、水平对置、风冷和水冷、化油器 4 冲程 ROTAX 912 ULS2 发动机驱动,最大功率为 73.5 千瓦(100 马力),转速为 5800 rpm。该飞机的基本版本配备螺旋桨 EVRA PerformanceLine 175/xxx/805.5。它是 3 叶地面可调螺旋桨,直径为 1750 毫米(68.9 英寸)。它具有木质核心叶片,外面覆盖着玻璃纤维,前缘加固。叶片安装在铝制轮毂中。螺旋桨轮毂连接到法兰和底板上,并固定在发动机的螺旋桨法兰上。复合材料螺旋桨固定在底板上。牵引版本配备螺旋桨 KW-31 (EASA.P.177),这是一种 3 叶片电动飞行可调式飞机螺旋桨,直径为 1.726 米 (67.95 英寸)。叶片由实木和复合材料组合而成。螺旋桨可以手动或自动模式作为恒速螺旋桨操作。
飞机维护手册 - Aerospool飞机维护手册 - Aerospool
WT9 Dynamic LSA / Club 飞机是单引擎、双座(并排排列)、悬臂式低翼飞机,带有十字形尾翼。主要结构由玻璃和碳复合材料组成。飞机配备固定三轮起落架,带有可操纵前轮。飞机由 4 缸、水平对置、风冷和水冷、化油器 4 冲程 ROTAX 912 ULS2 发动机驱动,最大功率为 73.5 千瓦(100 马力),转速为 5800 rpm。该飞机的基本版本配备螺旋桨 EVRA PerformanceLine 175/xxx/805.5。它是 3 叶地面可调螺旋桨,直径为 1750 毫米(68.9 英寸)。它具有木质核心叶片,外面覆盖着玻璃纤维,前缘加固。叶片安装在铝制轮毂中。螺旋桨轮毂连接到法兰和底板上,并固定在发动机的螺旋桨法兰上。复合材料螺旋桨固定在底板上。牵引版本配备螺旋桨 KW-31 (EASA.P.177),这是一种 3 叶片电动飞行可调式飞机螺旋桨,直径为 1.726 米 (67.95 英寸)。叶片由实木和复合材料组合而成。螺旋桨可以手动或自动模式作为恒速螺旋桨操作。
LFXS27566 R3 - LG
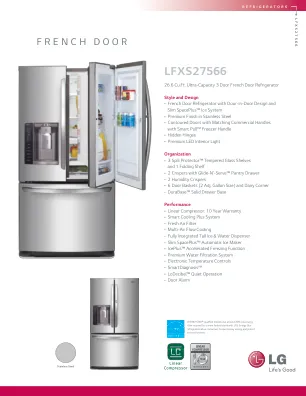
容量 冰箱 冷冻室 总计 特点 冷冻室门类型 Energy Star 能耗(千瓦时/年) 冰水分配器 高分配器 分配器灯 水过滤系统 制冷 线性压缩机 新鲜空气过滤器 数字温度控制 控制与显示 数字温度传感器 LoDecibel 操作 门警报 门警报开/关按钮 IcePlus 制冰机 智能诊断 冰箱 门中门™ 搁板数量搁板类型 悬臂式搁板 搁板结构 保鲜盒 Glide N Serve 食品储藏抽屉 冰箱灯 冰箱门数量门箱 门箱材料 SpacePlus™ 制冰系统 冷冻室 上抽屉 中抽屉隔板 冷冻室灯 材料/饰面/类型 泡沫门隔热材料 门类型 隐藏式铰链 箱体背板 可选颜色 把手 尺寸/间隙/重量 深度(带手柄 不含手柄的深度 不含门的深度 深度(门打开时的总深度) 至箱体顶部的高度 至门顶部的高度 铰链宽度 宽度(带手柄的门打开 90°) 宽度(不带手柄的门打开 90°) 带手柄的门边缘间隙 不带手柄的门边缘间隙 安装间隙 重量(磅): 单位/箱 纸箱尺寸(宽 x 高 x 深) UPC 代码 LFXS27566 保修

14048 Valley Blvd,工业城,CA 91716(888)336-...
采用新技术实现加州有机废物转移目标 随着各大城市和企业努力实现加州到 2025 年 75% 的回收目标,Athens Services 正利用创新技术为客户迎接挑战。 目前,大多数有机废物和食物废物最终都被填埋。 这不仅是资源浪费,而且随着这些材料随着时间的推移而降解,它们会产生大量的甲烷气体。 据 CalRecycle 称,加州每年仅食物垃圾就估计有 600 万吨被填埋,约占所有垃圾填埋场垃圾的 18%。 加州已设定目标,到 2020 年将有机废物处理量减少 50%,到 2025 年减少 75%,到 2030 年将温室气体 (GHG) 排放量减少 40%。 加州各地的社区都在努力寻找实现这些目标的方法。 “这些更高的转移目标意味着要攻击更受污染的废物流,其中大部分都会被填埋,”Athens Services 资源回收总监 Riel Johnson 说。 “我们收到的有机物中,20-30% 可能是‘干净的’;我们需要处理剩余的有机物,以实现这些新的、更高的转移目标。” 雅典拥有南加州技术最先进的材料回收设施 (MRF),在垃圾填埋场转移垃圾方面处于该地区领先地位。现在,雅典正在开拓创新技术,结合现有工艺,将提高转移率。 雅典开发了一种名为有机分离压机 (OSP) 的机器,与一家工业压实机和粉碎机制造商合作制造。 “我们对这项技术有助于填补废物、回收和‘干净’有机物之间空白的潜力感到兴奋,”约翰逊说。 OSP 工艺 工作原理如下: 进入雅典工业城 MRF 的有机废物被装入有机处理系统。OSP 配备悬臂式螺旋钻或钻头,将废物推向液压启动门,将液体从材料中挤出并进入收集罐。然后将富含营养的液体装上油罐车,运往处理厂,在那里它可以被消化用于生产能源,或者被堆肥以将养分返回加州农田。洛杉矶县官员已经进行了几次测试,并批准对提取的有机物进行此类处理。剩余的干燥物质被分类以供有益再利用或转移至垃圾填埋场。该机器每小时处理约 40 吨并回收 20-40% 的材料;以前,这些材料 100% 都被运往当地的垃圾填埋场。该技术和团队俄亥俄州的 Komar Industries 是一家重型工业压实机和粉碎机制造商,他们为雅典开发了这台设备。OSP 将 Komar 压缩螺旋钻与专门的脱水装置相结合,该脱水装置是为处理机场跑道上使用的除冰液而开发的。Komar 总裁马克·科尼格 (Mark Koenig) 表示:“我们看到这种趋势在全球范围内发展。”

已发表论文的一些参考文献 - RockMass
地质学、工程地质学、岩石力学和岩石工程领域已发表论文的一些参考文献 1. Aagaard B.、Grøv E. 和 Blindheim OT (1997):喷射混凝土作为不利岩石条件下岩石支护系统的一部分。国际岩石支护研讨会,地下结构应用解决方案。挪威利勒哈默尔。 2. Aagaard B. 和 Blindheim OT (1999):挪威三条海底隧道穿越极差薄弱区。ITA 世界隧道大会 '99 论文集,奥斯陆,10 页。 3. Aasen O.、Ödegård H. 和 Palmström A. (2013):阿尔巴尼亚加压引水隧道规划。挪威水电隧道 II。出版物编号。 22. 挪威隧道协会,2013 年,第 21-27 页。4. Abbiss CP(1979 年):通过地震勘测和大型水箱试验对 Mundford 白垩的硬度进行了比较。Géotechnique,29,第 461-468 页。5. Abelo B. 和 Schlittler F.(1973 年):为玻利维亚中央系统提供额外电力。Water Power,1973 年 4 月,第 121-128 页。6. Aglawe JP(1998 年):高应力地面地下洞室周围的不稳定和剧烈破坏。加拿大金斯敦皇后大学采矿工程系博士论文。正在进行中。7. Aitcin PC、Ballivy G. 和 Parizeau R.(1984 年):浓缩硅灰在灌浆中的应用。创新水泥灌浆,ACI 出版物 SP-83,1984 年,第 1-18 页。 8. Aksoy OC、Geniş M.、Aldaş UC、Özacar V.、Özer CS 和 Yılmaz Ö.(2012 年):使用经验方法确定岩体变形模量的比较研究。工程地质学 131-132,19-28。 9. Aldrich MJ(1969 年):孔隙压力对 Berea 砂岩受实验变形的影响。美国地质学会通报,第 80 卷,第 8 期,第 1577-1586 页。 10. Aleman,VP(1983 年):悬臂式掘进机的切割率预测,隧道和隧道施工,第 23-25 页。 11. Alemdag S.、Gurocak Z. 和 Gokceoglu C. (2015):一种基于简单回归的岩体变形模量估算方法。J. Afr. Earth Sci. 110,75–80。12. Alemdag S.、Gurocak Z.、Cevik A.、Cabalar AF 和 Gokceoğlu,C. (2016):使用神经网络、模糊推理和遗传编程对分层沉积岩体的变形模量进行建模。工程地质学 203,70–82。13. Allen H. 和 Johnson AW (1936):确定土壤膨胀特性的测试结果。公路研究委员会会议记录,美国 16,220。14. Almén KE.、Andersson JE.、Carlsson L.、Hansson K. 和 Larsson NA。 (1986):结晶岩的水力测试。单孔测试方法的比较研究。SKB 技术报告 86-27。Svensk Kärnbränslehantering AB。15. Alonso E. 和 Berdugo IR (2005):含硫酸盐粘土的膨胀行为。Proc. Int. Conf. Problematic Soils。法马古斯塔,2005 年。