XiaoMi-AI文件搜索系统
World File Search System控制序列

用于初始化氮空位自旋寄存器的量子控制序列的优化
许多量子信息协议的实施需要对量子寄存器进行有效的初始化。在本文中,我们优化了一种粒子捕获协议,用于初始化与金刚石中单个氮空位 (NV) 中心相关的混合自旋寄存器。我们通过使用一系列微波、射频和光脉冲极化 NV 的电子和核自旋来初始化量子寄存器。我们使用速率方程模型来解释光脉冲作用下的粒子分布。将该模型与通过执行部分量子态层析成像获得的实验数据进行了比较。为了进一步增加自旋极化,我们提出了一种具有优化光脉冲的递归协议。我们还讨论了核和电子自旋泵送速率的相对值在实现最大自旋极化程度中的作用。
利用 Daubechies 小波对快速时变磁场进行量子传感
摘要 结合使用量子传感技术和正交函数(如 Walsh 和 Haar 小波函数)作为量子位的控制序列,可以重建时变磁场的波形。然而,Walsh 和 Haar 小波函数的分段常数性质会在重建波形中引起脉冲形伪影。在本文中,我们提出了一种强大的量子传感协议,通过使用基于高平滑度 Daubechies 小波的控制序列来驱动量子位。时变磁场波形重建时伪影可忽略不计,精度更高。基于 Bloch 球面上表示的直观模型,推导出量子位读数、量子态的累积相位和小波系数之间的基本数学关系。通过使用由 Daubechies 小波函数调制的连续微波控制序列控制每个量子位,可以将产生的量子位读数与指定的小波系数相关联。然后利用这些系数通过逆小波变换重构出更平滑、更准确的时变磁场波形。在不同的 Daubechies 小波参数设计下,对单音、三音和含噪波形进行了仿真,以验证所提方法的有效性和准确性。基于 Daubechies 小波的波形重构方法也可应用于磁共振波谱以及重力、电场和温度的测量。

太空骑手的任务分析和轨迹设计...
轨迹设计和优化是通过PoliteCnico di Torino创建的MATLAB代码的更新和增强来实现的,该代码通过STK Object Mode Model Software与STK方案相连。这两个软件的协同使用使MATLAB函数可以迭代Astrogator上的不同可能的轨迹解决方案,即STK的轨迹设计工具。然后,这些解决方案的相关结果和属性由MATLAB函数保存在专用结构中或在图中绘制,以帮助连续的分析和选择最佳任务控制序列。此软件分析工具用于为SROC任务的两个Conops设置最佳任务控制序列:观察和观察和检索方案。此外,分析了与Conops报告的任务阶段的几个偏差,以评估它们如何影响后续阶段。对于每个可能的偏差,都会对其进行验证,以尊重总持续时间,总deltav和空间骑手的安全性的约束。

Troy W. Borneman – 博士
6. 非线性谐振器的模型不敏感控制,美国专利申请 17/122,120 (2021) 5. 生成用于量子控制的控制序列,美国专利 10,587,277 (2020)。 4. 高效自旋极化,美国专利 10,371,767 (2019)。 3. 使用腔体极化自旋集合,美国专利 10,197,641 (2019)。

自主计算的愿景:LLM可以使其成为现实吗?
虽然大型语言模型(LLM)在完成各种语言处理任务方面取得了成功,但它们通过正确生成控制序列而轻松地无法与物理世界进行交互。我们发现,主要原因是LLM并非基于物理世界。现有的基于LLM的方法通过依靠其他预定义的技能或预先训练的亚物质来解决此问题,从而使很难适应新任务。相比之下,我们旨在解决这个问题,并提示提示预先训练的LLMS在无训练范式中完成一系列机器人操纵任务。因此,我们提出了一个称为LLM+A(ffordance)的框架,其中LLM既可以用作子任务计划者(该一代高级计划)和运动控制器(生成低级控制序列)。为了将这些计划并控制在物理世界上,我们开发了可承受的提示技术,该技术将LLM刺激到1)预测生成计划的后果; 2)对于相关对象而言,生成的计划值得负担得起。经验,我们评估了LLM+A在各种语言条件的机器人操作任务中的有效性,这表明我们的方法通过增强生成的计划和控制的可行性而实质上改善了性能,并且可以轻松地对不同的环境产生。
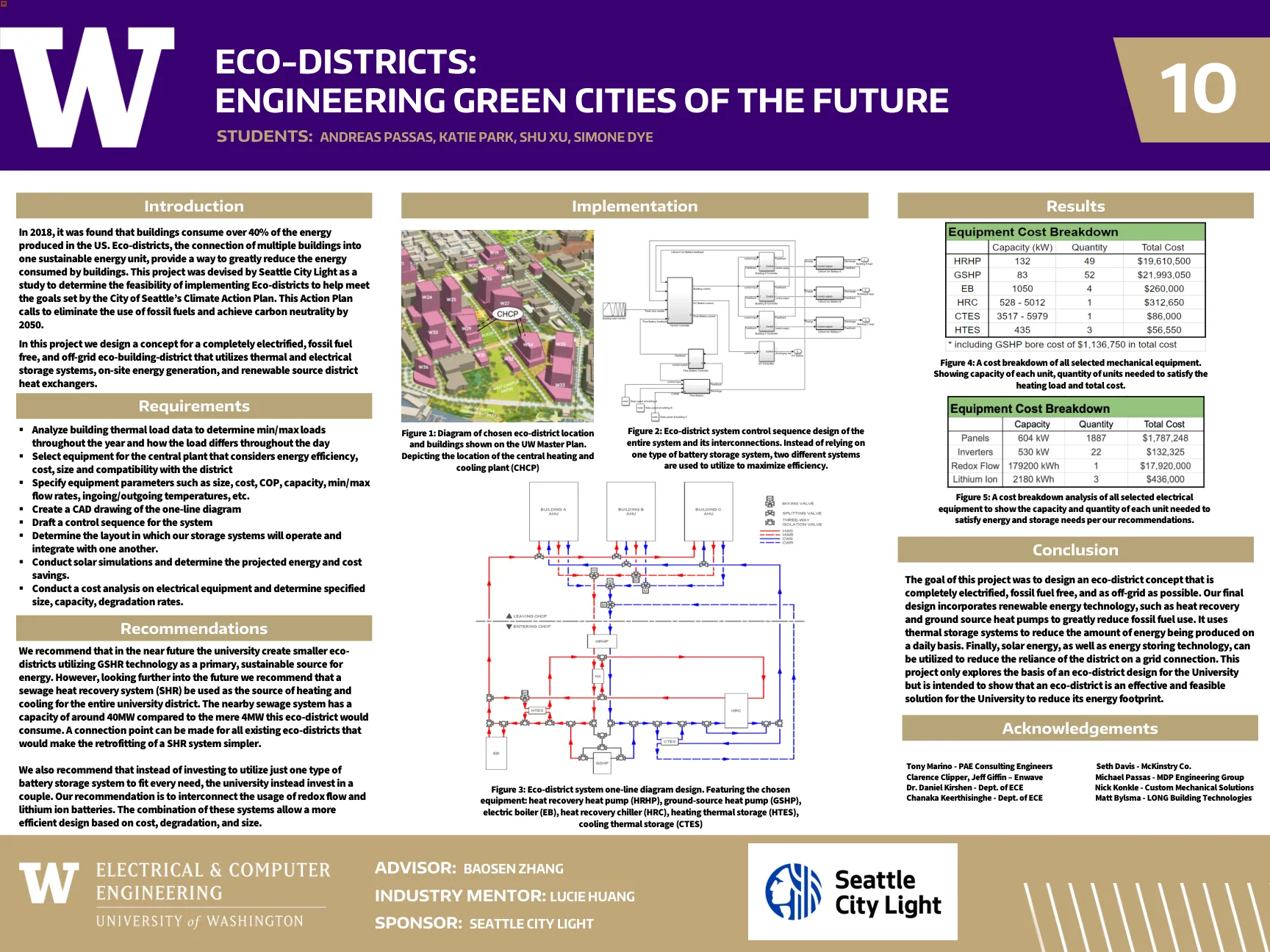
行业导师:LUCIE HUANG
分析建筑热负荷数据,确定全年的最小/最大负荷以及全天负荷的变化情况 选择中央工厂的设备时,考虑能源效率、成本、尺寸和与区域的兼容性 指定设备参数,如尺寸、成本、COP、容量、最小/最大流量、进/出温度等。 创建单线图的 CAD 绘图 为系统起草控制序列 确定我们的存储系统将在其中运行和相互集成的布局。 进行太阳能模拟并确定预计的能源和成本节省。 对电气设备进行成本分析并确定指定的大小、容量、退化率。

通过挤压和后选择生成 Greenberger-Horne-Zeilinger 状态
许多量子态制备方法依赖于耗散量子态初始化和随后的幺正演化到所需目标状态的组合。在这里,我们展示了量子测量作为量子态制备的附加工具的实用性。从纯可分离多部分状态开始,控制序列(包括旋转、通过单轴扭曲的自旋压缩、量子测量和后选择)生成高度纠缠的多部分状态,我们将其称为投影压缩 (PS) 状态。然后,通过优化方法,我们确定了最大化 PS 状态与最大纠缠 Greenberger-Horne-Zeilinger (GHZ) 状态重叠保真度所需的参数。与仅通过单轴扭曲的幺正演化进行准备相比,该方法可显著减少 GHZ 状态的状态准备时间,从而成功实现后选择结果。
使用 NEBridge® Golden Gate 的快速 1 天工作流程...
分子生物学工具能够定制蛋白质,并完全控制序列、纯化标签、分泌信号和其他性能特征。虽然工具的广泛性使研究人员能够创建他们所需的蛋白质,但这个过程通常涉及使用活细胞的低通量和耗时的数天工作流程。为了克服这些限制,我们展示了一种完全体外的工作流程,该工作流程结合了 Golden Gate DNA 组装、滚环扩增 (RCA) 和无细胞蛋白质表达 (CFPE),可同时快速筛选多种蛋白质设计的影响(图 1,第 2 页)。该工作流程使研究人员能够使用一组基本的定制 DNA 载体或插入片段在短短一天内生成一系列蛋白质变体。它还提供了一种评估每种目标蛋白质独有的工程约束的方法,并允许快速识别可溶性蛋白质。

COBL扩散:使用控制屏障和Lyapunov功能在动态环境中基于扩散的条件机器人计划
抽象 - 装备自主机器人,能够在人类周围安全有效地导航的能力是迈向实现可信赖的机器人自治的关键一步。但是,在确保动态多机构环境中的安全性的同时生成机器人计划仍然是一个关键挑战。基于最新的工作,以利用深层生成模型在静态环境中进行机器人计划,本文提出了Cobl-Diffusion,这是一种基于扩散的新型安全机器人计划器,用于动态环境。COBL扩散使用控制屏障和Lyapunov函数来指导扩散模型的固定过程,迭代地完善了机器人控制序列以满足安全性和稳定性约束。我们使用两个设置证明了COBL扩散的有效性:合成单位环境和现实世界中的行人数据集。我们的结果表明,COBL扩散会产生平滑的轨迹,使机器人能够到达目标位置,同时保持低碰撞速率,并具有动态障碍。