XiaoMi-AI文件搜索系统
World File Search System数字雷达
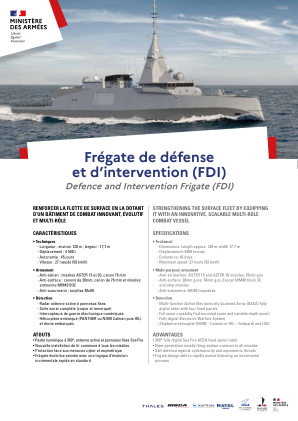
防御与干预护卫舰(FDI)
• 探测 - 带固定面板的有源天线雷达 - 完整的声纳套件(船体和拖曳) - 数字电子战拦截器 - 机载直升机(PANTHER 或 NH90 Caïman 然后是 HIL)和机载无人机优势 • 360° 数字雷达、有源天线和固定 Sea Fire 面板 • 所有导弹通用的新型发射装置 • 防范网络和非对称威胁 • 可扩展的护卫舰,采用快速增量演进逻辑作为标准设计